Caleb Christianson and Michael T. Tolley
University of California San Diego
1.Introduction
Dielectric elastomer actuators (DEAs) hold considerable potential for a wide range of applications, including soft robotics, microfluidics, and optics, based on their large strains, high energy density, and high efficiency. [1]–[6] They are of interest for underwater applications, but only a limited number of submersible applications have been achieved, partially due to the challenge of identifying suitable electrode materials. Many DEAs incorporate carbon-based electrodes, which are challenging to pattern in complex geometries and are subject to mechanical abrasion. [7], [8] When considering underwater applications, ionic conductors are a viable alternative to traditional, carbon-based electrodes. Ionic conductors provide unique advantages over other electrodes due to their negligible impact on stiffness, tunable conductivity, and potentially simplified design. Some implementations can even take advantage of being optically transparent and having improved biocompatibility.
2. Gel Electrodes
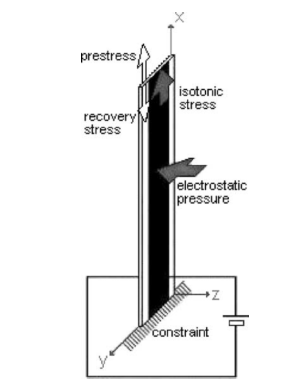
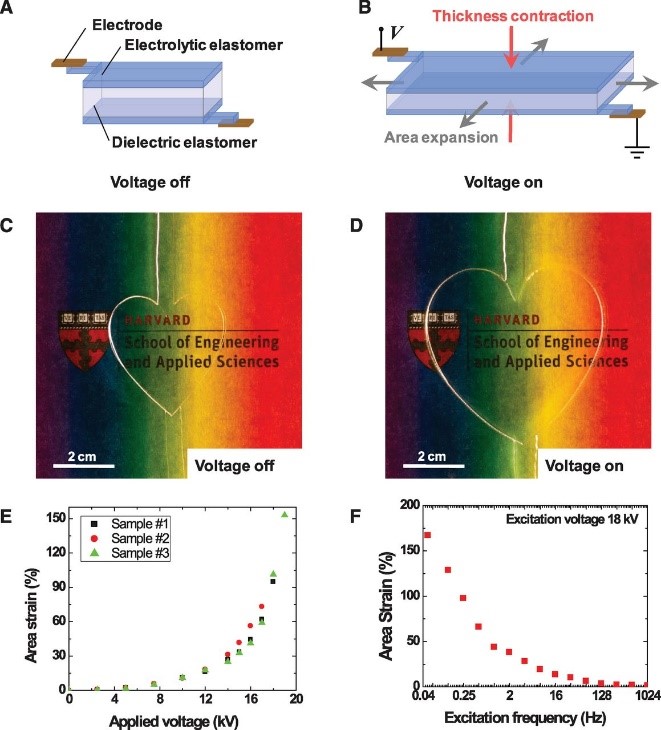
Carpi et al. was the first to implement ionic electrodes for DEAs in a thickened electrolyte solution for planar actuators, as shown in Figure 1. [9] While testing several electrode materials, they determined that a NaCl gel performed suitably well when compared to carbon-based electrodes. Later, Keplinger et al. introduced ionic hydrogels for electrodes in high speed DE actuation, [10] providing an insightful foundation to the considerations of using ionic conductors for DEAs. In this work, they could achieve actuation even at high frequencies, as shown in Figure 2.
Figure 1 A thickened electrolyte gel was smeared onto a planar DEA, demonstrating effective actuation over a range of potentials. [9]
Figure 2 (A-B) A dielectric elastomer is sandwiched by two layers of an electrolytic elastomer (hydrogel). When a potential is applied through the hydrogels, across the dielectric, the electrostatic forces result in a contraction in thickness and expansion in area. (C-D) The electrolytic and dielectric layers are both optically transparent, motivating optical applications, and are shown to be effective across a range of voltages (E) and frequencies (F). [10]
3. Fluid Electrodes
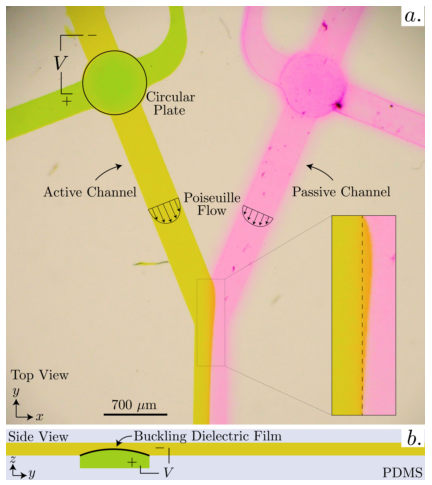
More recently, Tavakol et al. demonstrated the effectiveness of ionic conductors for DEAs through an implementation of conductive fluid as the working electrodes in a DEA-driven microfluidics chip. [11] Figure 3 demonstrates their design: upstream of one branch in a Y-junction in a microfluidics chip, a buckling DEA was used to affect the downstream flow. Interestingly, they applied the potential through two streams of fluid that were separated by a DE membrane. This is the first known work of completely fluid ionic electrodes for DEAs.
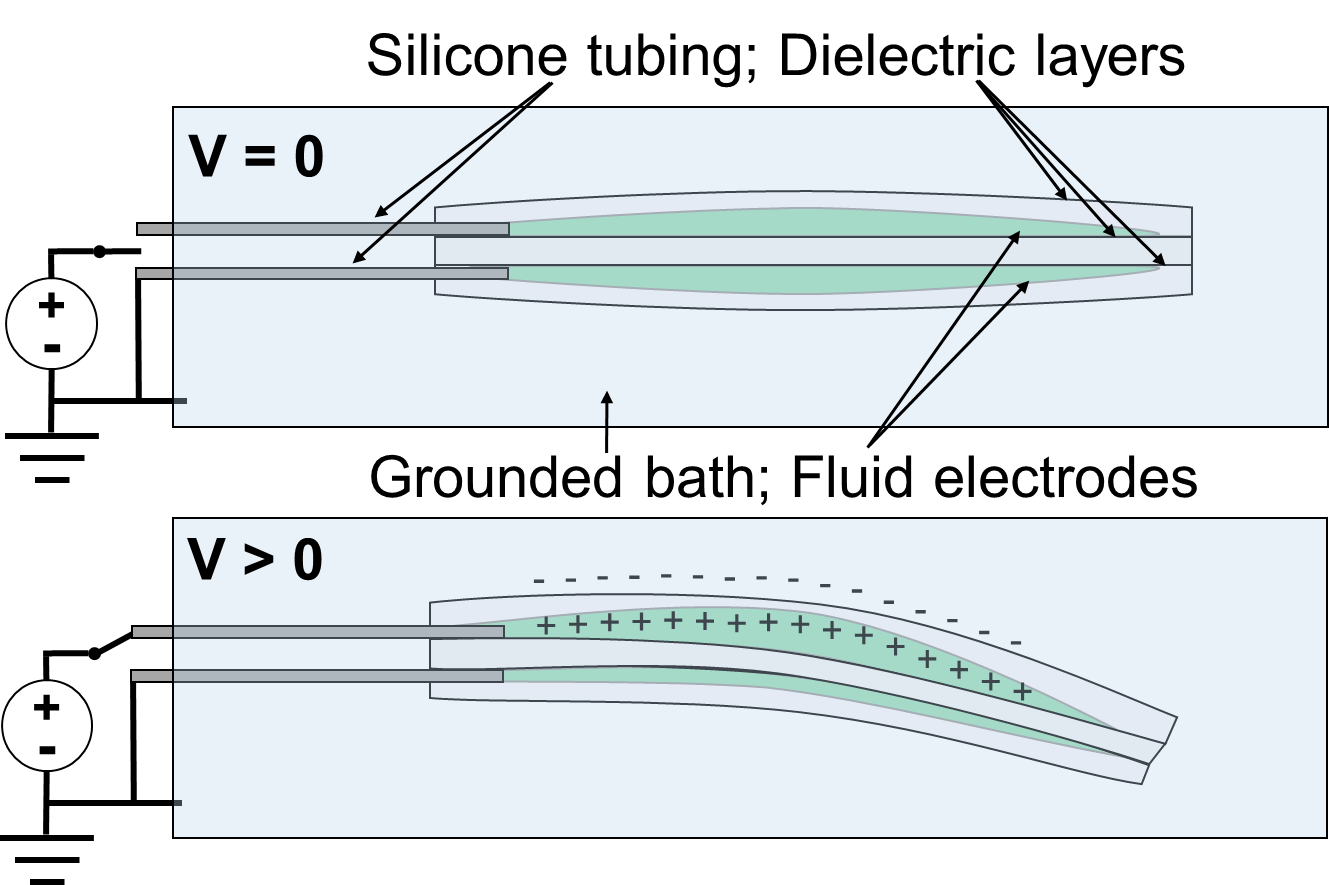
Building upon the previous efforts, Christianson et al. developed a bimorph DEA for submersible soft robotics using fluid electrodes, shown in Figure 4. [12] Using this structure, they created a swimming, soft robot that swam through a conductive fluid while using ionic electrodes to achieve actuation. In this design, they used the conductive fluid that the actuator was submerged in to serve as a ground electrode, obviating the need to explicitly pattern and fabricate electrode pairs for their DEAs, simplifying the design and fabrication process.
Figure 3 A potential is applied through the green and yellow streams, across a buckling dielectric film where they overlap. Voltage-induced buckling of the film induces a change in the downstream flow, which can be observed where the yellow and pink channels meet. [11]
Figure 4 Schematic and working principle of bimorph DEA with fluid electrodes. Three layers of a dielectric elastomer encapsulate two chambers containing fluid electrodes. The electrodes are connected to a high voltage power supply by silicone tubing and the actuator is submerged in a grounded bath. When a voltage is applied across one of the electrodes w.r.t. the grounded bath, charges build up, compressing and lengthening the dielectric elastomer. As one side lengthens and the other side remains unactuated, a bending moment is induced, causing the bimorph to curl to one side. [12]
4. Hybrid Electrodes
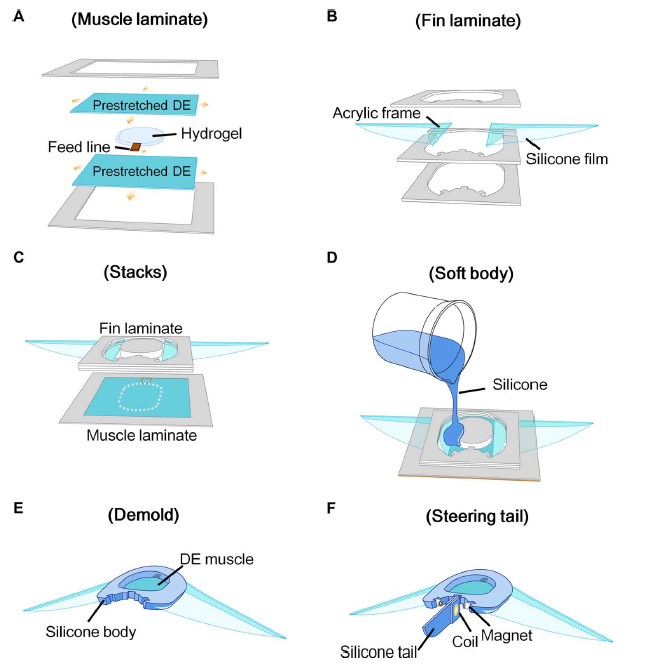
Further examples of using DEAs in underwater robotics include the work of Godaba et al., which established one of the first works on implementing DEAs on submersible robotics in a jellyfish-inspired robot. [13] Recently, Shintake et al. developed submersible, biomimetic fish- and jellyfish-inspired robots using DEAs. [14] As shown by Godaba et al. and Shintake et al., DEAs can provide effectual actuation in submersible soft robots. However, both implementations relied upon carbon-based electrodes. Li et al. developed a hybrid approach, combining both hydrogel and fluid electrodes, to realize a fast moving, soft robotic fish. [15] This exciting new effort, shown in Figure 5, combines hydrogels for the encapsulated electrode layer within the body of the fish and takes advantage of the surrounding fluid as the ground plane for their DEAs.
Figure 5 Overview of a fast moving, soft electronic fish. A hydrogel electrode is sandwiched between two layers of a DE. Fins and the soft body are formed around the actuator. Once demolded, actuation of the DE causes the fins to flap, enabling the fish to swim. [15]
5. Conclusion
These are some of the recent efforts that demonstrate the viability and potential of using ionic conductors for DEAs. Gel-based electrodes provide patternable conductive films, while fluid electrodes need to either be encapsulated in a channel or pouch, or can serve as a ground plane for submerged implementations. These ionic conductors have been shown to leverage the advantages of DEAs in air (e.g., high strains and fast response), while further enabling their practical use in fluidic and underwater applications.
6. References
[1] R. E. Pelrine, R. D. Kornbluh, and J. P. Joseph, “Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation,” Sensors Actuators A Phys., vol. 64, no. 1, pp. 77–85, 1998.
[2] R. D. Kornbluh, R. Pelrine, J. Joseph, R. Heydt, Q. Pei, and S. Chiba, “High-field electrostriction of elastomeric polymer dielectrics for actuation,” Proc. SPIE, vol. 3669, no. 1, pp. 149–161, 1999.
[3] Y. Bar-Cohen, Electroactive polymer (EAP) actuators as artificial muscles: reality, potential, and challenges, vol. 136. SPIE press, 2004.
[4] P. Brochu and Q. Pei, “Advances in dielectric elastomers for actuators and artificial muscles,” Macromol. Rapid Commun., vol. 31, no. 1, pp. 10–36, 2010.
[5] F. Carpi, S. Bauer, and D. De Rossi, “Stretching Dielectric Elastomer Performance,” Science (80-. )., vol. 330, no. 6012, pp. 1759–1761, 2010.
[6] I. A. Anderson, T. A. Gisby, T. G. McKay, B. M. O’Brien, and E. P. Calius, “Multi-functional dielectric elastomer artificial muscles for soft and smart machines,” J. Appl. Phys., vol. 112, no. 4, pp. 0–20, 2012.
[7] L. Maffli, S. Rosset, M. Ghilardi, F. Carpi, and H. Shea, “Ultrafast all-polymer electrically tunable silicone lenses,” Adv. Funct. Mater., vol. 25, no. 11, pp. 1656–1665, 2015.
[8] S. Rosset and H. R. Shea, “Towards fast, reliable, and manufacturable DEAs: miniaturized motor and Rupert the rolling robot,” Electroact. Polym. Actuators Devices, vol. 9430, p. 943009, 2015.
[9] F. Carpi, P. Chiarelli, A. Mazzoldi, and D. De Rossi, “Electromechanical characterisation of dielectric elastomer planar actuators: Comparative evaluation of different electrode materials and different counterloads,” Sensors Actuators, A Phys., vol. 107, no. 1, pp. 85–95, 2003.
[10] C. Keplinger, J.-Y. Sun, C. C. Foo, P. Rothemund, G. M. Whitesides, and Z. Suo, “Stretchable, Transparent, Ionic Conductors,” Science (80-. )., vol. 341, no. 6149, pp. 984–987, 2013.
[11] B. Tavakol and D. P. Holmes, “Voltage-induced buckling of dielectric films using fluid electrodes,” Appl. Phys. Lett., vol. 108, no. 11, p. 112901, 2016.
[12] C. Christianson, N. Goldberg, S. Cai, and M. T. Tolley, “Fluid electrodes for submersible robotics based on dielectric elastomer actuators,” in SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring, 2017, p. 101631O–101631O–8.
[13] H. Godaba, J. Li, Y. Wang, and J. Zhu, “A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator,” IEEE Robot. Autom. Lett., vol. 1, no. 2, pp. 624–631, 2016.
[14] J. Shintake, H. Shea, and D. Floreano, “Biomimetic Underwater Robots Based on Dielectric Elastomer Actuators,” IEEE/RSJ Int. Conf. Intell. Robot. Syst., vol. 2, pp. 4957–4962, 2016.
[15] T. Li, G. Li, Y. Liang, T. Cheng, J. Dai, X. Yang, B. Liu, Z. Zeng, Z. Huang, Y. Luo, T. Xie, and W. Yang, “Fast-moving soft electronic fish,” Sci. Adv., vol. 3, no. 4, Apr. 2017.
| Attachment | Size |
|---|---|
| Figure1.png | 28.98 KB |
| Figure2.jpg | 98.85 KB |
| Figure3.png | 323.64 KB |
| Figure4.png | 101.82 KB |
| Figure5.png | 198.07 KB |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}