You are here
Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing

ttps://onlinelibrary.wiley.com/doi/full/10.1002/adfm.201806698
Fast‐Response, Stiffness‐Tunable Soft Actuator by Hybrid Multimaterial 3D Printing
Yuan-Fang Zhang, Ningbin Zhang, Hardik Hingorani, Ningyuan Ding, Dong Wang, Chao Yuan, Biao Zhang, Guoying Gu,* and Qi Ge*
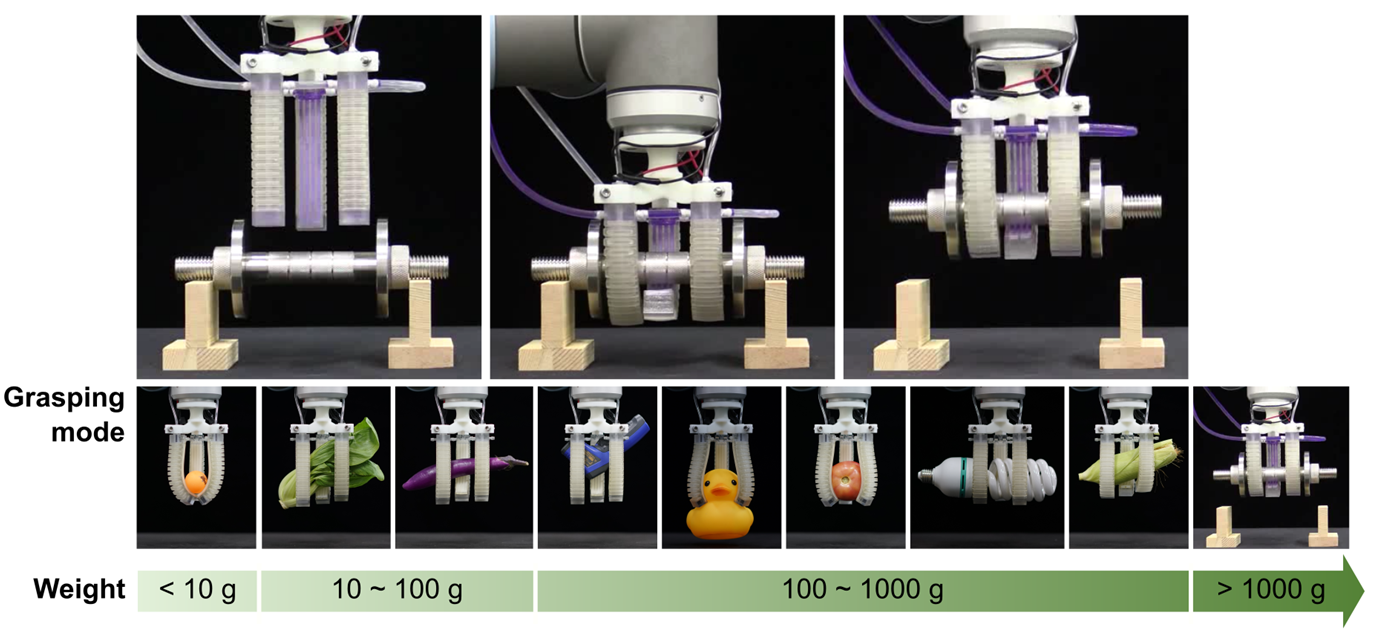
Soft robots have the appealing advantages of being highly flexible and adaptive to complex environments. However, the low-stiffness nature of the constituent materials makes soft robotic systems incompetent in tasks requiring relatively high load capacity. Despite recent attempts to develop stiffness-tunable soft actuators by employing variable stiffness materials and structures, the reported stiffness-tunable actuators generally suffer from limitations including slow responses, small deformations, and difficulties in fabrication with microfeatures. This work presents a paradigm to design and manufacture fast-response, stiffness-tunable (FRST) soft actuators via hybrid multimaterial 3D printing. The integration of a shape memory polymer layer into the fully printed actuator body enhances its stiffness by up to 120 times without sacrificing flexibility and adaptivity. The printed Joule-heating circuit and fluidic cooling microchannel enable fast heating and cooling rates and allow the FRST actuator to complete a softening–stiffening cycle within 32 s. Numerical simulations are used to optimize the load capacity and thermal rates. The high load capacity and shape adaptivity of the FRST actuator are finally demonstrated by a robotic gripper with three FRST actuators that can grasp and lift objects with arbitrary shapes and various weights spanning from less than 10 g to up to 1.5 kg.
| Attachment | Size |
|---|---|
| 868.38 KB |
{kind=link}
- KevinGE's blog
- Log in or register to post comments
- 2627 reads
Recent comments