
Dear Colleague,
I write to bring your attention to a recent paper describing the use of a planar version of Bergou et al.'s discrete elastic rod theory to model and simulate a prototype caterpillar-inspired soft robot. The paper just appeared in Soft Robotics:
https://www.liebertpub.com/doi/10.1089/soro.2018.0104
The paper is a product of a collaboration between Derek Paley's group at the University of Maryland at College Park, Carmel Majidi's group at Carnegie Mellon University, and my research group at the University of California at Berkeley. In addition to a discussion of how DER can be used to model branched structures, the paper also contains a description of procedures that are used to calibrate the model. The formulation and procedures discussed in the paper can be applied to other soft robots.
| Attachment | Size |
|---|---|
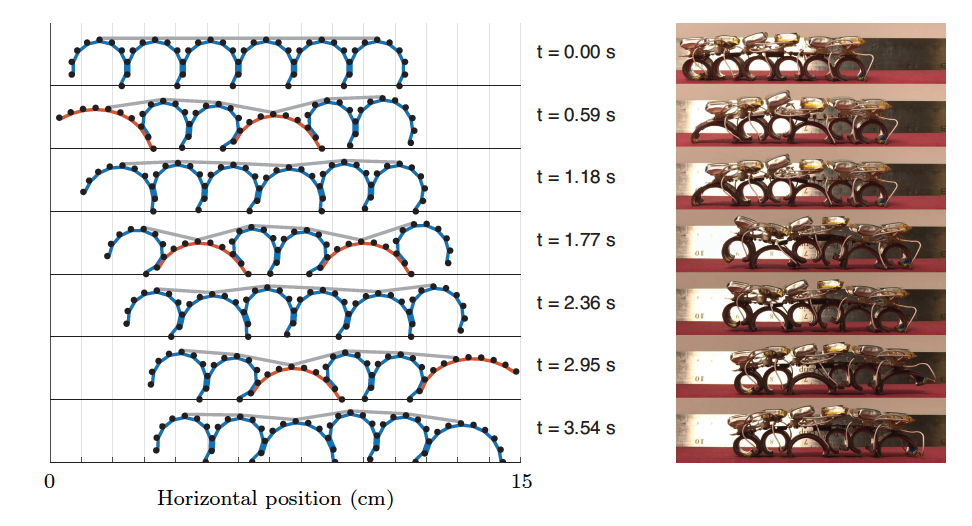
| Figure: Simulation of a caterpillar-inspired soft robot prototype | 386.65 KB |
{kind=link}