
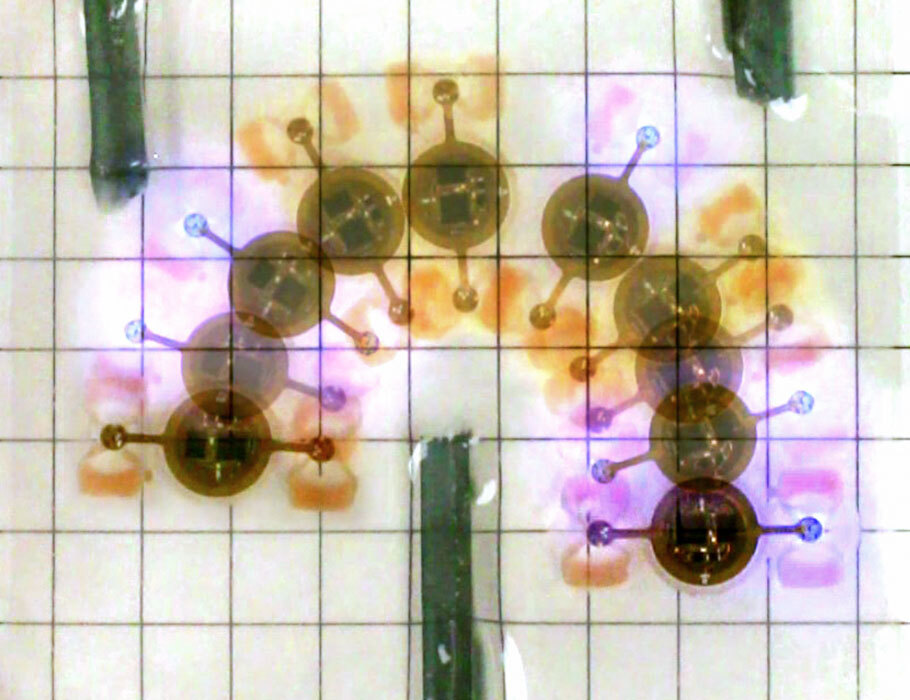
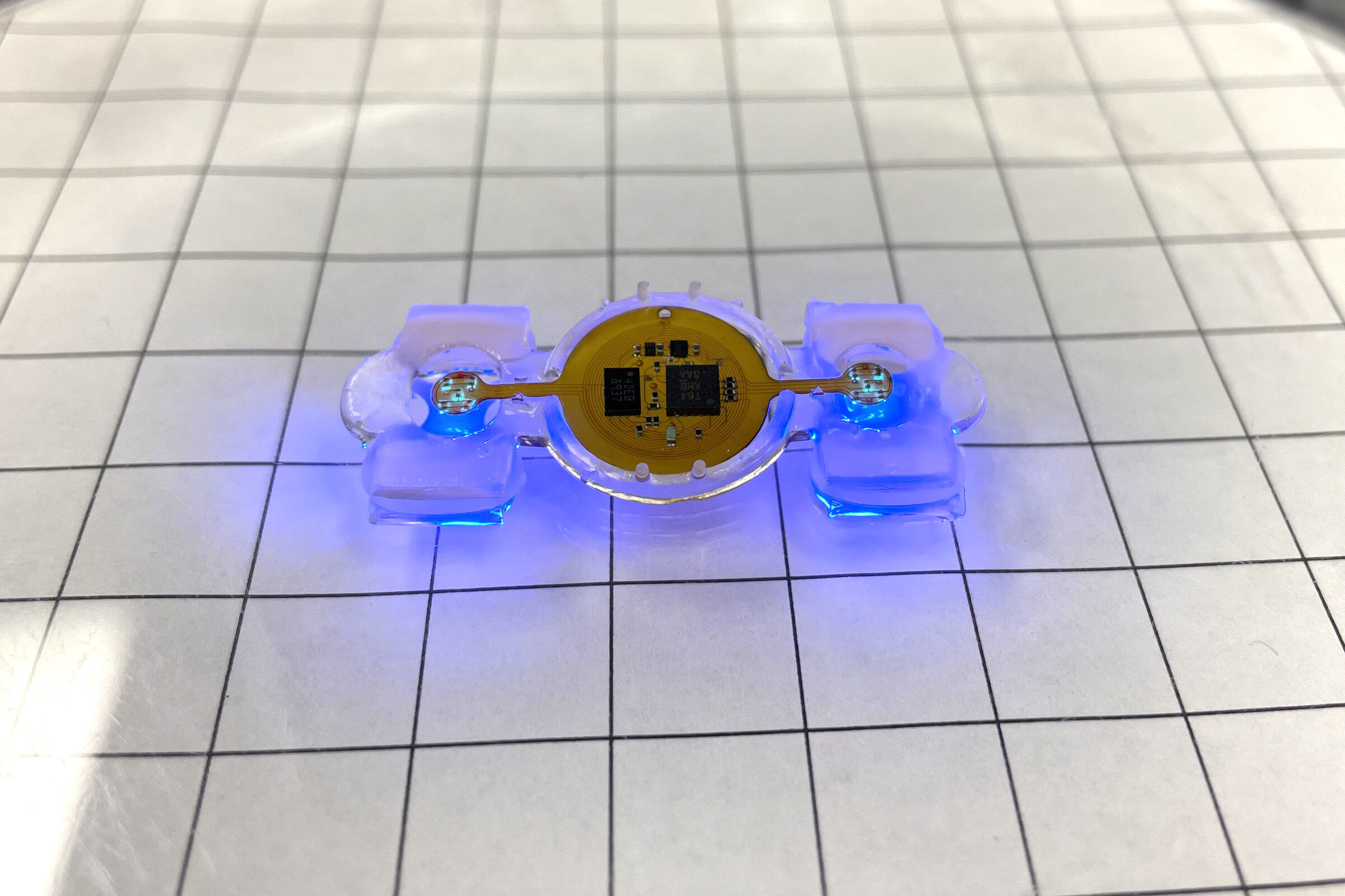
In this work, we presented biohybrid electronic robots (eBiobot) powered by optogenetic skeletal muscles and controlled by wireless optoelectronics, allowing remote control of switching, steering, and other more sophisticated functions. The eBiobot inherits the structural concept motivated by a physiological muscle-tendon-bone architecture from previously demonstrated walking robots, where 3D engineered skeletal muscle tissue forms around an asymmetric hydrogel scaffold. Responding to external stimuli, muscles perform cyclic contractions, deform the scaffold, and propel the robot through asymmetric friction generated at the scaffold-substrate interface. This work paves the way toward a class of biohybrid machines able to combine biological actuation and sensing with on-board computing.
The paper “Remote control of muscle-driven miniature robots with battery-free wireless optoelectronics” is available online. DOI: 10.1126/scirobotics.add1053.
This is a collaborative project between Prof. John Rogers' research group at NU and Bashir's Group at UIUC. This work has been hightlighted by many media outles.
| Attachment | Size |
|---|---|
| keyimage.jpg | 122.35 KB |
| eBiobot | 463.77 KB |
{kind=link}
{kind=link}