Wanliang Shan
Associate Professor of Mechanical and Aerospace Engineering
Syracuse University
Introduction
Robotic gripping is not a new technology but unsolved challenges remain. A key longstanding problem is robotic manipulation of objects that are small, delicate, and curved. Such objects are encountered in multiple industries such as electronics & semiconductors and automotive & transportation, where automation would yield significant benefits. Different industries require grippers with different characteristics. Established robotic gripping approaches, such as mechanical grippers and vacuum-based systems are either not cost effective or do not work for small, delicate and curved objects. Tunable dry adhesion can address this longstanding challenge if key performance metrics of new adhesion technologies such as adhesion tunability, activation time, activation energy, robustness can be better than that of existing ones. Over the years, my group and collaborators have worked to develop and improve tunable adhesion technologies for robotic manipulation purposes. We start by understanding relevant adhesion mechanics, and then use active stimuli such as electricity and pneumatics to trigger mechanics change in smart structures for dynamical tuning of dry adhesion.
Adhesion Mechanics of Heterogenous Pillars and Subsurface Stiffness Modulation (SSM)
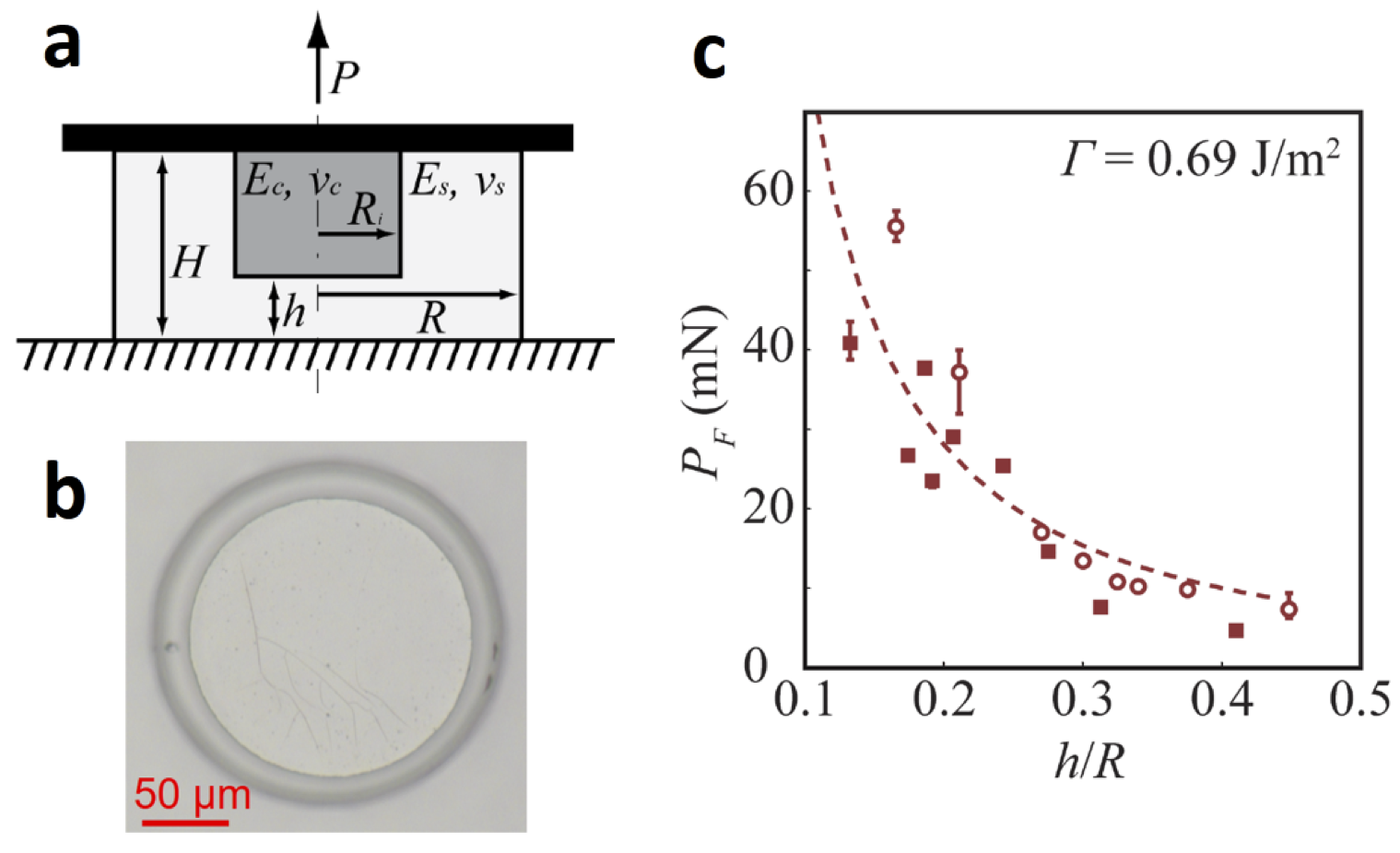
The use of composite structures with stiff subsurface components to control the stress distribution at an adhered interface and thus the dry adhesion strength was proposed and demonstrated by the Turner group [1] using cylindrical pillars with a rigid core and soft shell (Fig. 1a). Initial work showed a ~ 3.5 x increase in dry adhesion through the placement of a stiff core in a compliant polydimethylsiloxane (PDMS) pillar [2]. The Turner group then showed that the adhesion strength could be increased through miniaturization of the pillars by fabricating 200-micrometer diameter cylindrical composite pillars comprised of a stiff core and a soft PDMS shell using photolithography and molding (Fig. 1b) [3]. These smaller pillars have adhesion enhancement of up to 9x and dry (van der Waals mediated) adhesion strengths of >1.5 MPa, which is 15x higher than the gripping pressure provided by vacuum [3]. This work showed the potential for composite structures to achieve high dry adhesion strength, but these structures did not contain an active material and thus the adhesion could not be tuned dynamically.
Figure 1: (a) Schematic and (b) Optical micrograph (end on view) of a 200 µm diameter composite pillar containing a rigid core. (c) Experimental (markers) and finite element simulation (dashed line) results showing increase in adhesion with decreasing shell thickness, h. [3]
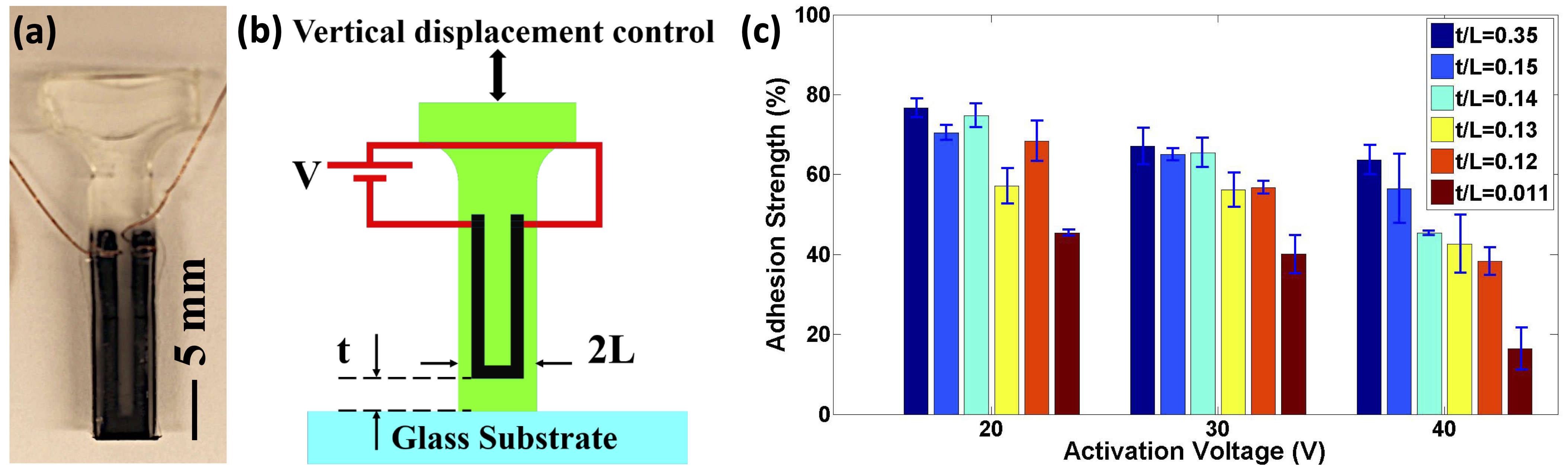
The concept of creating surfaces with dynamically tunable dry adhesion through SSM was proposed and investigated by Shan and Turner [4]. A composite core-shell structure containing a core with stiffness that can be dynamically changed for adhesion control was demonstrated (Fig. 2) [5]. We showed that by dynamically altering the stiffness of the core the stress distribution at the interface and hence the effective adhesion strength could be altered. A smart material, conductive propylene-based elastomer (CPBE), which contains structured carbon black particles dispersed in a propylene-ethylene copolymer [6], was used as the core, and PDMS as the shell (Fig. 2a, 2b) [4, 5]. The CPBE is electrically conductive and melts at 75 degree Celsius, thus can be softened by applying an electrical current, and can be formed via thermal pressing [6] or laser-patterned to geometries like the U-shaped core in the structures shown in Fig. 2a, 2b [5].
Figure 2: (a, b) Composite core-shell posts (CPBE core and PDMS shell) with dynamically tunable dry adhesion. (c) Adhesion testing results showed up to 6× dry adhesion change (17% of original strength) [5].
The PDMS-CPBE composite core-shell pillars realized an adhesion change up to 6x and the degree of adhesion change could be tuned through the voltage and pillar geometry (Fig. 2c}). The effective adhesion strength was as high as ~ 100 kPa, thus allowing a pillar with a 3mm x 5mm gripping surface in Fig. 2a to pick up objects as heavy as ~ 1.5 N [2]. For the 20 V and 30 V tests shown, the samples were not completely activated and thus the adhesion change with activation was less compared to activation at 40 V (Fig. 2c). In some tests, the activation time was reduced to 5 seconds by using an activation voltage of ~ 80 V.
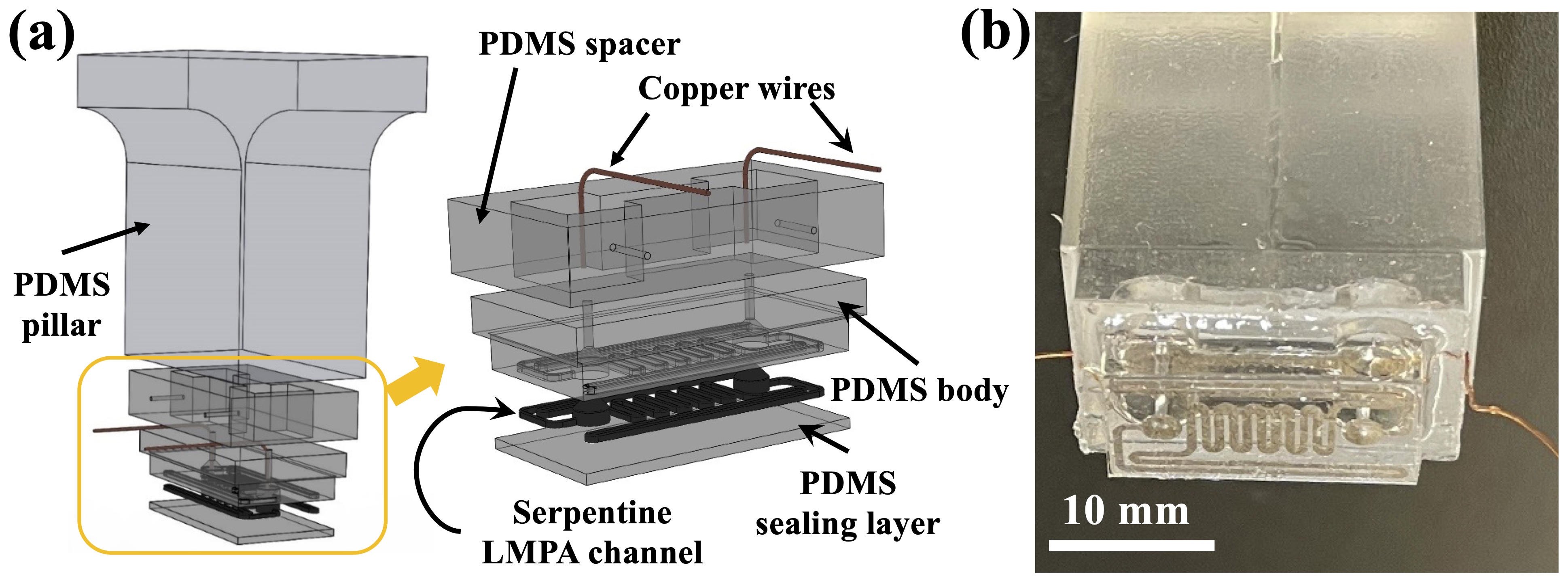
Figure 3: A PDMS pillar containing a thin layer of LMPA close to the interface for DTDA. Results show up to 2x dry adhesion change (50% of the original strength) [7].
To improve the performance of SSM technology in terms of activation time and activation voltage, the Shan group has also tried embedding thin channels of low melting point alloy (LMPA) into a layer close to the bottom surface of a PDMS pillar to achieve dynamically tunable dry adhesion through SSM (Fig. 3) [7]. Results show that such a device can be activated with 5 V within much shorter time (~ 1 second) due to the high electrical conductivity and much less volume of smart material (LMPA) used, but the adhesion change is much lower (~2x). The reason is that the thickness/height of the smart layer/core turns out to be important to achieve relatively uniform stress distribution on the interface for higher dry adhesion when not activated [7].
Adhesion Mechanics of Soft Hollow Pillars and Subsurface Pressure Modulation (SPM)
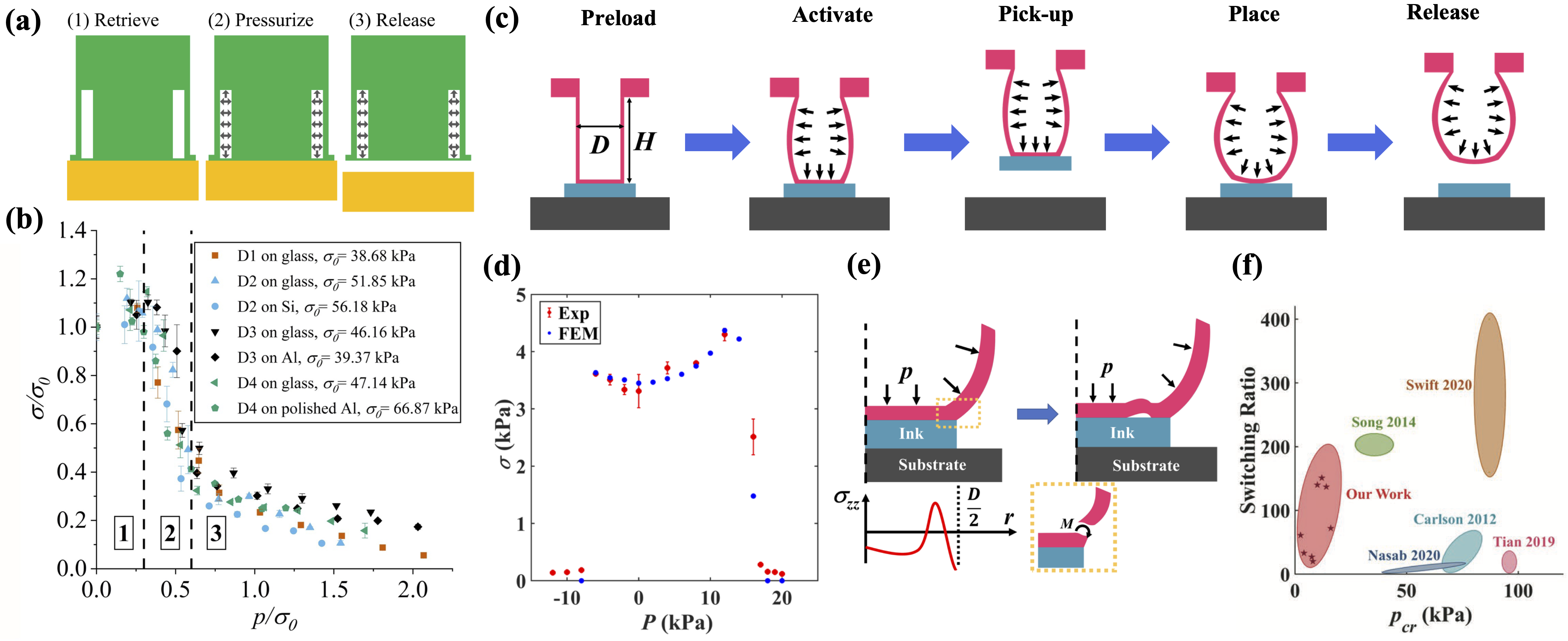
As SSM through electrical activation has been shown to be an effective approach to dynamically tunable adhesion, one naturally wonders whether pressure can be used to alter the stress distribution on the interface and thus adhesion. Shan and Turner groups have also recently explored tunable adhesion through SPM [8,9,10]. Two soft cylindrical pillar structures have been explored, one containing an annular chamber (Fig. 4a, 4b) [8] and the other being completely hollow and termed soft hollow pillar (SHP) (Fig. 4c-4e) [9]. The underlying mechanics for SPM using these two structures is similar to that of SSM in that when pressure inside the hollow pillar changes, the stress distribution on the contact surface will be changed (Fig. 4e) and thus the dry adhesion (Fig. 4b, 4d) [8, 9]. For the pillar made of PDMS (E = 2 MPa) containing an annular chamber, roughly 50 kPa is needed to change dry adhesion by 5x as shown in Fig. 4b [8], whereas for the SHP made of vinylpolysiloxane (VPS, E = 0.18 MPa), an activation pressure pcr of 15 kPa is needed to change the dry adhesion through sidewall bulging (Fig. 4d), and pcr of -10 kPa is needed to change the dry adhesion through sidewall buckling (Fig. 4f) [9]. Note that the adhesion strength in Fig. 4d is much lower than those in Fig. 4b (~5kPa vs. 50 kPa). This is expected as the bigger the hollow chamber is and the softer the elastomeric material used, the lower the dry adhesion force it can provide.
Figure 4: Working principles and performances of tunable adhesives based on SPM using either (a) a soft pillar containing an annular chamber, or (c) an SHP. (b) Adhesion of the soft pillar containing an annular chamber against various surfaces under pressure [8]. (d) Adhesion of an SHP under negative and positive pressure [9]. (e) Crack initiates from high stress region near edge of SHP under positive pressure. (f) Performance of tunable adhesion using SHP in terms of adhesion switching/change ratio and activation pressure pcr compared with other studies [9].
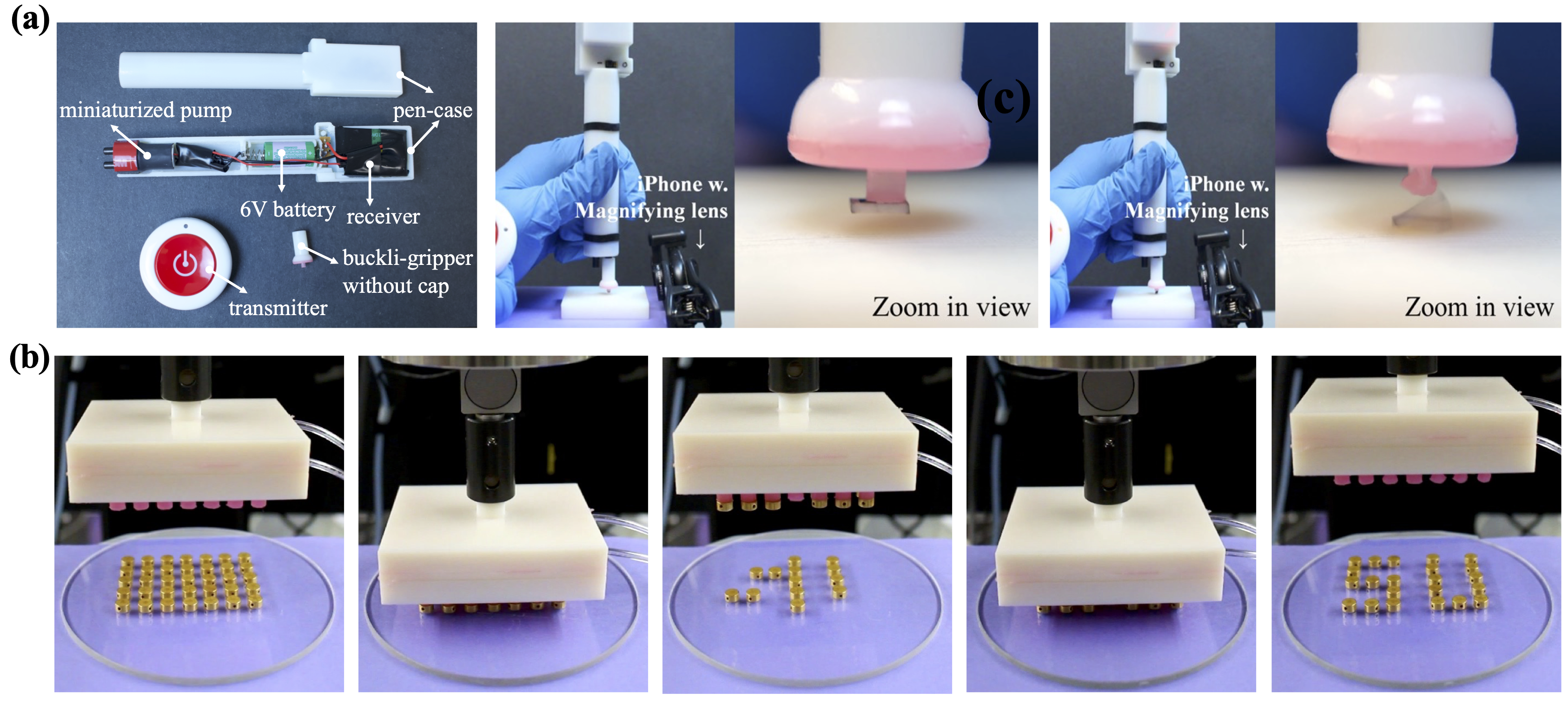
Based on the SHP design, a tetherless soft gripper containing a micropump, a button battery, and a single pillar has been fabricated. It can be used to manipulate a whole range of thin and lightweight objects, including a microelectronics part as shown in Fig. 5a. Note that some curved objects such as a small LED light can also be manipulated using this soft gripper [9]. In addition to a single SHP, a device with arrays of SHPs has also been demonstrated to selectively manipulate arrays of objects (Fig. 5b). These demos showcase the versatility of SHPs with highly tunable adhesion for potential practical applications in compliant manipulation.
Figure 5: Demonstration of versatility of SHP with dynamically tunable adhesion in (a) a tetherless gripper, and (b) a device with arrays of SHPs for selective object manipulation [9].
Discussions and Perspective
The underlying mechanism for tunable adhesion through SSM can also be interpreted using an energy balance framework presented by Bartlett et al. [11], where the compliance of the structure is found to be critical in determining the adhesion strength of the interface. Effectively, when the subsurface smart material component is softened, the compliance of the structure increases, and the adhesion force decreases. The Bartlett group most recently has tried to apply this principle to integrate rigid and soft grippers into one device for versatile manipulation [12]. This mechanism cannot be directly applied to interpret the SPM approach, though. There have also been recent efforts from other groups such as the Arzt group towards tunable adhesion for robotic manipulation, taking advantage of solid pillar and rod buckling for soft grippers design [13, 14]. This mechanics understanding has been integrated into soft gripper design for robotic pick-and-place applications [15].
Through the previously described efforts on SSM and SPM, tunable dry adhesion on the order of hundreds of times of change with low pressure and energy cost within a fraction of a second has been achieved. In the meantime, for application scenarios where pneumatics is not readily available such as deep space, the SSM approach offers a convenient alternative that can be activated by button batteries. Shan and Turner groups have also explored other aspects of the adhesion mechanics, such as the effect of cross section shape of these solid and hollow pillars on tunable adhesion [16, 17]. These findings can be used to modify the geometry of the pillars to improve the gripper performance. It must be noted here that, these tunable adhesion technologies based on SSM and SPM can be used to deal with objects that are small and flat, but they cannot handle curved objects easily yet.
To design soft gripper that can handle curved objects, recently the Shan group in collaboration with Prof. KT Wan at Northeastern University, has been investigating the adhesion mechanics of soft shells [18, 19]. Elastomeric shells are compliant and can adapt to the curvature of objects more easily than a pillar structure. Shell adhesion mechanics has never been examined carefully. Using a combined experimental, computational, and theoretical approach, Shan and Wan have been able to characterize the shell adhesion magnitude to be a fraction of that of a JKR solid made of the same elastomer with the same radius [19]. Most recently, the Aghababaei group has studied the friction behavior of soft shells under mechanical loading [20]. These fundamental studies are expected to inspire more interests on the topic, which hopefully will lead to outcomes that can facilitate the design of soft grippers based on shell adhesion.
Conclusions
Here we show that by deepening mechanics understanding of soft structures, we can design smart adhesives with tunable dry adhesion for robotic manipulation applications. We expect more advances in robotic manipulation building on novel mechanics uncovered in the future.
References
[1] Kevin Turner and Helen Minsky. Surfaces with tunable adhesion based on composite structures and methods of making the same, February 4 2020. US Patent 10,549,483.
[2] Helen K Minsky and Kevin T. Turner. Achieving enhanced and tunable adhesion via composite posts. Applied Physics Letters, 106(20):201604, 2015.
[3] Helen K Minsky and Kevin T Turner. Composite microposts with high dry adhesion strength. ACS Applied Materials & Interfaces, 9(21):18322–18327, 2017.
[4] W.L. Shan and K.T. Turner. Methods for Fast and Reversible Dry Adhesion Tuning between Composite Structures and Substrates. Mar. 1, 2022. US Patent No. 11,260,642.
[5] Milad Tatari, Amir Mohammadi Nasab, Kevin T. Turner, and Wanliang Shan. Dynamically tunable dry adhesion via sub-surface stiffness modulation. Advanced Materials Interfaces, 5:1800321, 2018.
[6] Wanliang Shan, Stuart Diller, Abbas Tutcuoglu, and Carmel Majidi. Rigidity-tuning conductive elastomer. Smart Materials and Structures, 24(6):065001, 2015.
[7] Amir Mohammadi Nasab, Patrick Stampfli, Siavash Sharifi, Aoyi Luo, Kevin T. Turner, and Wanliang Shan. Dynamically tunable dry adhesion through a subsurface thin layer with tunable stiffness. Advanced Materials Interfaces, 9(7):2102080, 2022.
[8] Amir Mohammadi Nasab, Aoyi Luo, Siavash Sharifi, Kevin T Turner, and Wanliang Shan. Switchable adhesion via subsurface pressure modulation. ACS applied materials & interfaces, 12(24):27717–27725, 2020.
[9] G. Wan, Y. Tang, K.T. Turner, T. Zhang, W.L. Shan, Tunable Dry Adhesion of Soft Hollow Pillars through Sidewall Buckling under Low Pressure; Advanced Functional Materials, 33(2):2209905, 2023.
[10] Wanliang Shan and Guangchao Wan. Highly Tunable Dry Adhesion of Soft Hollow Pillars through Sidewall Buckling under Low Pressure. Sep. 2023. US Patent Application.
[11] Bartlett, M.D., Croll, A.B., King, D.R., Paret, B.M., Irschick, D.J., Crosby, A.J.: Looking beyond fibrillar features to scale gecko-like adhesion. Advanced Materials 24(8), 1078–1083, 2012.
[12] Maya Keely, Yeunhee Kim, Shaunak A. Mehta, Joshua Hoegerman, Robert Ramirez Sanchez, Emily Paul, Camryn Mills, Dylan P. Losey, Michael D. Bartlett, Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic Manipulation. arXiv:2404.13755
[13] Y Wang, X Zhang, R Hensel, E Arzt, Sliding mechanism for release of superlight objects from micropatterned adhesives, Advanced Materials Interfaces 9 (5), 2101764, 2022.
[14] Xuan Zhang, Yue Wang, Zhihao Tian, Manar Samri, Karsten Moh, Robert M McMeeking, René Hensel, Eduard Arzt, A bioinspired snap-through metastructure for manipulating micro-objects. Science Advances 8 (46), eadd4768, 2022.
[15] M Samri, J Thiemecke, R Hensel, E Arzt, Application of machine learning to object manipulation with bio-inspired microstructures, Journal of Materials Research and Technology 27, 1406-1416, 2023.
[16] Aoyi Luo, Amir Mohammadi Nasab, Milad Tatari, Shuai Chen, Wanliang Shan, and Kevin T. Turner. Adhesion of flat-ended pillars with non-circular contacts. Soft Matter, 16(41):9534–9542, 2020.
[17] G. Wan, W.L. Shan, Pneumatically Tunable Adherence of Elastomeric Soft Hollow Pillars with Non-Circular Contact, International Journal of Solids and Structures, 294:112736, 2024.
[18] C. Zhao, X. Chen, W.L. Shan, K.T. Wan. Adherence of a Hyperelastic Shell on a Rigid Planar Substrate; International Journal of Solids and Structures, 236:111351, 2022.
[19] C. Zhao, K.T. Wan, W.L. Shan, Progressive Adhesion Mechanics of Elastomeric Shells against a Rigid Substrate: from Thin to Thick, Extreme Mechanics Letters, 68:102140, 2024.
[20] Riad Sahli, Jeppe Mikkelsen, Mathias Sätherström Boye, Marcelo A. Dias, and Ramin Aghababaei, Frictional Contact of Soft Polymeric Shells, Phys. Rev. Lett. 133, 106202, 2024.
| Attachment | Size |
|---|---|
| Minimization | 439.61 KB |
| SSM.png | 1.43 MB |
| SSM_LMPA.png | 3.51 MB |
| SPM.png | 1.5 MB |
| Soft Gripper.png | 5 MB |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}