
Journal club on Viscoelastic Metamaterials
by
David M.J. Dykstra and s.janbaz [at] uva.nl (Shahram Janbaz) and coulais [at] uva.nl (Corentin Coulais)
Machine Materials Lab, Institute of Physics, University of Amsterdam, the Netherlands
1 Introduction
Mechanical metamaterials exhibit a plethora of exotic mechanical responses. Static responses of interest span a wide range of tunable behaviors, such as auxetic [1–3], programmable [4,5], shape-changing [6,7], non-reciprocal [8] to chiral responses [9], often by harnessing nonlinear mechanics and snap-through instabilities [4, 5, 10–12]. Interesting dynamical responses include shock absorption [13–16], soliton
propagation [17, 18] and transition waves [19, 20].
Although the effect of the constitutive materials’ dissipation on mechanical instabilities has been well studied [21–28], dissipation has remained overlooked for nonlinear metamaterials. As a matter of fact, extensive care has often been devoted in the constitutive materials’ choice to avoid strong dissipative effects. Only recently has dissipation in mechanical metamaterials started to attract some attention: on one hand demonstrating the shortcomings from ignoring dissipation in mechanical metamaterials [29] but on the other hand demonstrating the wide variety of additional functionalities which can be obtained by leveraging dissipation in mechanical metamaterials [30–33].
In this journal club, we discuss the interplay between mechanical instabilities and viscoelasticity. We also discuss the new opportunities that spatial patterning of viscoelastic properties offer for the design of mechanical metamaterials with properties that depend on loading rate.
2 Delayed Snap-through Buckling by Dissipation
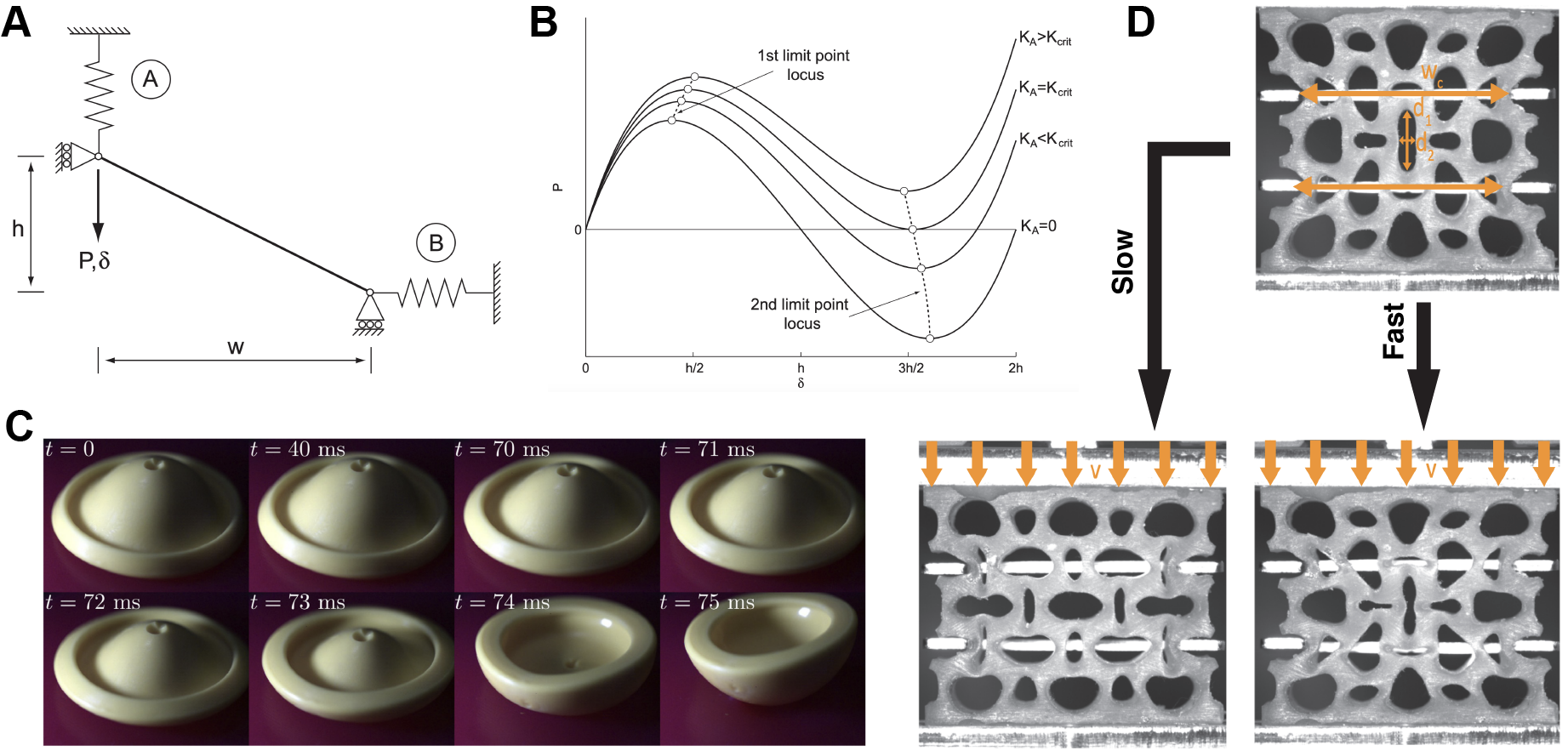
Figure 1: Delayed buckling by dissipation. (A) A single rigid truss supported at both ends by elastic springs (adapted from [23]). Changing the ratio of the spring stiffnesses can be considered equivalent to increasing the loading rate in a viscoelastic analysis. The equilibrium paths in (B) (adapted from [23]) show that both monostable and bistable configurations are possible. (C) A viscoelastic jumping popper shows pseudo-bistability (adapted from [26]). (D) A laterally preconfined viscoelastic mechanical metamaterial for shock absorption experiences a snap-through instability only when compressed slowly (adapted from [29]).
Mechanical metamaterials often harness mechanical instabilities [34]. In particular, they often employ snap-through instabilities [34]. As such, we need to understand how dynamics and dissipation affects mechanical (snap-through) instabilities before we can develop new types of dissipative
metamaterials.
On one hand, while quasi-static buckling analyses do not consider any timescale, even purely elastic snap-through instabilities show a very distinct time dependence, transitioning from a very slow state of storing elastic energy to a fast snap-through motion [35]. This is what allows for instance the Venus flytrap or the hummingbird to catch its prey [36, 37].
Adding dissipation complicates the dynamics of instabilities. Viscoelastic dissipation in instabilities has already been explored extensively since the pioneering works of Kempner in 1954 for beam buckling [21] and Nachbar and Huang in 1967 for snap-through instabilities [22]. As one might expect, they showed that the buckling force increases with increasing loading rate, in line with what one might expect with linear viscoelastic materials.
From a qualitative perspective, an equivalent quasi-static analysis can offer significant insights, such as the Von Mises Truss set-up explored by Santer in Fig. 1A [23]. Here, you can find a rigid Von Mises truss, suspended by a vertical spring A and a horizontal spring B on the top and right,
with spring stiffness KA and KB respectively. When pulling down the top of the Von Mises truss, it can be argued that increasing the ratio of KA=KB is equivalent to increasing the strain rate in a viscoelastic analysis, where spring A experiences a much larger deflection rate than spring B when the
Von Mises truss is deflected downward. Therefore, spring A might obtain a larger increase in effective stiffness due to viscoelastic effects. The relation between force P, deflection delta and KA=KB is then captured in Fig. 1B [23]. Two major effects can be identified in in Fig. 1B. First of all, as
KA=KB increases, not only does the buckling force of the first limit point increase, but so does its deflection. Second, as KA=KB increases, the second limit points moves upward and stops crossing 0 above a critical KA > Kcrit . At this point, the structure loses its bistability and becomes monostable again.
This quasi-static behaviour is in fact very common in viscoelastic snap-through instabilities and has been referred to as temporary bistability [23], pseudo-bistability [24–26] or acquired bistability [27]. For instance, viscoelastic jumping poppers (Fig. 1C) can appear bistable initially but may
still snap back to the original state due to viscoelasticity [26].
However, while it is very logical that viscoelasticity can increase the buckling force and deflection, the opposite can also be true. Stein-Moldavo et al. recently showed that the buckling pressure of spherical shells could also drop due to viscoelastic effects [28]. When a negative pressure was
kept stable just below the elastic buckling limit, a viscoelastic shell would still buckle after relaxation. This is because the relaxation induces additional geometric imperfections, which in turn leads to a reduction in the buckling pressure.
As discussed above, there is a well established understanding of the role of viscoelasticity on instabilities of flexible structures. In comparison, comparably little is known on metamaterials, which consist of many such flexible building blocks. It turns out that the viscoelasticity-induced pseudo stability can in fact greatly affect the performance of mechanical metamaterials. Dykstra et al. showed in Fig. 1D that viscoelasticity
can prevent a mechanical metamaterial featuring snap-through instabilities from snapping altogether under large strain rates [29]. From a shock damping perspective, this means that a higher strain rate could actually induce poorer shock damping performance when no snap-through
occurred. The strain at which this transition occurred was then tailored by shape-changing. This showed the very careful interrelation between geometry and dissipation in viscoelastic metamaterials.
In summary, delayed snap-through and modification of stability by viscoelasticity can occur because different parts of the structure or the metamaterial can experience different strain-rates. In turn, these different parts experience different levels of stiffening induced by viscoelasticity and this modifies the energy landscape. In the second section, we will show that suitable spatial patterning of the viscoelastic properties allows to further control how the energy landscape depends on strain rate.
3 Dissipation to Dynamically Seed Imperfections and Control Energy Landscapes
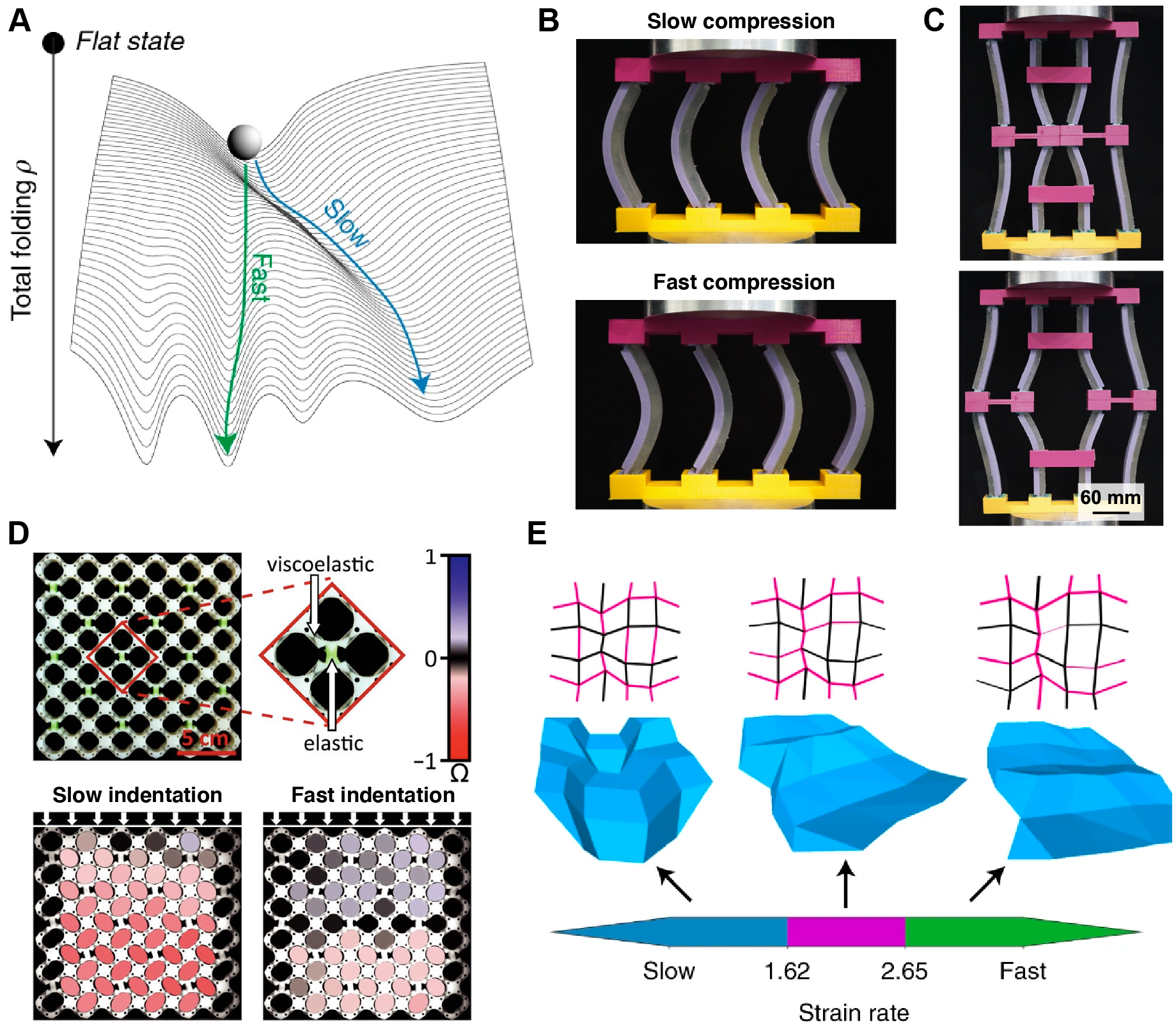
Figure 2: Dissipation to dynamically seed imperfections and control energy landscapes. (A) Viscoelasticity and loading rate can be used to navigate an energy landscape with multiple valleys (adapted from [30]). (B) Elastic-viscoelastic bi-beams can switch buckling direction when changing loading rate (adapted from [32]) and (C) can allow switching between auxetic and non-auxetic when turned into a mechanical metamaterial (adapted from [32]). (D) Loading rate can also be used to switch modes altogether in metamaterials with a distinct number of global modes and both elastic and viscoelastic hinges (adapted from [33]). (E) An origami sheet featuring a higher number of modes and both elastic and viscoelastic hinges can also experiences alternative modes at intermediate loading rates (adapted from [30]).
Flexible metamaterials based on buckling and snapthrough instabilities exhibit complex energy potentials— with mountains and valleys. We argue in this section that viscoelastic dissipation is an efficient way to control how metamaterials navigate such landscapes, based on the loading rate
(Fig. 2A). As such, the deformation pathways and ensuing shape-changes and effective properties of the metamaterials can depend dramatically on whether the metamaterials are loaded fast or slow.
The control over such deformation pathways can be achieved by spatially patterning the viscoelasty of the flexible building blocks. The simplest example is perhaps that of Euler beam buckling. In such a case, the patterning of the viscoelastic relaxation strength allows to induce an imperfection that depends on strain-rate [32] (Fig. 2B). In practice, take a column split in two parts: the left (right) half of the column is made of a materials with a small (large) viscoelastic relaxation strength. When the column is loaded along its axis, it will buckle to the left (right) when loaded slower (faster) than the typically relaxation timescale of the more viscoelastic material. This happens due to a shift in the neutral axis. When loaded slowly (fast), the viscoelastic material is much softer (stiffer), so the neutral axis shifts left (right) of the point of load application and the beam therefore buckles to the left (right). This idea can applied to construct flexible structures that exhibits switching between auxetic and
non-auxetic behavior (Fig. 2C) or show negative viscoelasticity [32].
The paragraph above shows that the direction of buckling of a beam or a hinge can be controlled by its spatial patterning of viscoelascitiy. In this case there is a single deformation mode (the out-of-plane bending) and one controls its direction by inducing a strain-rate dependent imperfection.
In the following, we also discuss a different approach, which consists of using structures with more than one deformation mode and where the spatial patterning allows to selectively actuate the mode of choice based on loading rate.
Architectures that have been used for such an approach are oligomodal metamaterials (Fig. 2D) [33] or origami with multiple folding branches (Fig. 2E) [30]. The idea is the following: a metamaterial has a distinct number of global deformation modes (or folding branches for origami), such as
the metamaterial visualised in Fig. 2D which has two modes. One mode only actuates viscoelastic hinges, all of which act soft during slow loading of the structure. The other mode also actuates elastic hinges, which in are much softer than the viscoelastic hinges during fast loading of the structure. As a result, fast loading will energetically favour deforming the mode featuring elastic components. Where there are more modes available, it is then also possible to obtain additional deformation modes at intermediate loading rates (Fig. 2E) [30].
However, using only viscoelasticity is often not enough to navigate the energy landscape effectively and allow for a switchable actuation of the mode of choice [33]. In some cases, some modes tend to have a lower energy barrier and as such can be preferentially actuated regardless
of the rate of actuation or of the mismatch of viscoelasticity. Imperfections—traditionally considered a hazard in most mechanical systems— tailored to the preferred mode, can be used to tweak the energy landscape and hence to alleviate this problem. In quasi-static metamaterial designs
they have allowed branching into specific chosen bifurcation paths [38], while they can enable switching between modes when combined with viscoelasticity [33]. This means that imperfections can also be programmed specifically to change the loading rate at which mode switching occurs.
In summary, we have discussed how spatial patterning of viscoelastic relaxation strength allows to dynamically tune buckling imperfections or relative mode stiffness. We have discussed a few examples where this approach has been used to create metamaterials with shape-changes that depend on loading rate.
4 Outlook
The use of dissipation in mechanical metamaterials is starting to show its potential with viscoelasticity but the possibilities are endless. New developments in additive manufacturing, material science and computational design methods are fueling exciting new developments. And these possibilities are not limited to viscoelasticity which has been the main focus of this review so far. For instance, Che et al. showed that temperature can be used to expand the design space of the previously discussed pseudo-bistability in mechanical metamaterials [31]. In particular, they showed that by changing the temperature, they could control the amount of time it took to snapback. This is because the viscoelastic properties of rubbers
are highly temperature dependent. Alternatively, dissipation can be harnessed from different mechanisms than viscoelasticity. For instance, internal adhesive contacts can be used to generate extreme dissipation and recovery after loading of nanofoams [39], or active robotic dissipation can generate static non-reciprocity in mechanical metamaterials at a linear level [40]. One can also think of a plethora of alternative ways to harness dissipation, including for instance plastic, piezoelectric, magnetic or shape memory materials. With so many possibilities to harness dissipation in the design of mechanical metamaterials, the next step is to go from generating new types of mechanical behaviour to new functionalities to actual applications. Shock damping [29,31] or vibration damping [41] and soft robotics [42] offer exciting potential use cases.
References
[1] Lakes, R., 2014. “Foam structures with a negative poisson’s ratio”. Science, 235, pp. 1038–1040.
[2] Bertoldi, K., Reis, P., Wilshaw, S., and Mullin, T., 2010. “Negative poisson’s ratio behavior induced by an elastic instability”. Advanced Materials, 22(3),pp. 361–366.
[3] Babaee, S., Shim, J.,Weaver, J., Patel, N., and Bertoldi, K., 2013. “3d soft metamaterials with negative poisson’s ratio”. Advanced Materials, 25(36), pp. 5044–5049.
[4] Florijn, B., Coulais, C., and van Hecke, M., 2014. “Programmable mechanical metamaterials”. Physical Review Letters, 113(175503).
[5] Florijn, B., Coulais, C., and van Hecke, M., 2016. “Programmable mechanical metamaterials: the role of geometry”. Soft Matter, 12, pp. 8736–8743.
[6] Overvelde, J., Weaver, J., Hoberman, C., and Bertoldi, K., 2017. “Rational design of reconfigurable prismatic architected materials”. Nature, 541,
pp. 347–352.
[7] Coulais, C., Sabbadini, A., Vink, F., and van Hecke, M., 2018. “Multi-step self-guided pathways for shape-changing metamaterials”. Nature, 561, pp. 512–515.
[8] Coulais, C., Sounas, D., and Al`u, A., 2017. “Static nonreciprocity in mechanical metamaterials”. Nature, 542, pp. 461–464.
[9] Frenzel, T., Kadic, M., andWegener, M., 2017. “Threedimensional mechanical metamaterials with a twist”.Science, 358(6366), pp. 1072–1074.
[10] Rafsanjani, A., and Pasini, D., 2016. “Bistable auxetic mechanical metamaterials inspired by ancient geometric motifs”. Extreme Mechanics Letters, 9, pp. 291–296.
[11] Che, K., Yuan, C., Wu, J., Qi, H., and Meaud, J., 2017. “Three-dimensional-printed multistable mechanical metamaterials with a deterministic deformation sequence”. Journal of Applied Mechanics, 84(011004).
[12] Restrepo, D., Mankame, N., and Zavatierri, P., 2015. “Phase transforming cellular materials”. Extreme Mechanics Letters, 4, pp. 52–60.
[13] Frenzel, T., Findeisen, C., Kadic, M., Gumbsch, P., and Wegener, M., 2016. “Tailored buckling microlattices as reusable light-weight shock absorbers”. Advanced Materials, 28, pp. 5865–5870.
[14] Shan, S., Kang, S., Raney, J., Wang, P., Fang, L., Candido, F., Lewis, J., and Bertoldi, K., 2015. “Multistable architected materials for trapping elastic strain energy”. Advanced Materials, 27(29), pp. 4296–4301.
[15] Correa, D., Klatt, T., Cortes, S., Haberman, M., Kovar, D., and Seepersad, C., 2015. “Negative stiffness honeycombs for recoverable shock isolation”. Rapid Prototyping Journal, 21, pp. 193–200.
[16] Schaedler, T., Ro, C., Sorensen, A., Eckel, Z., Yang, S., Carter, W., and Jacobsen, A., 2014. “Designing metallic
microlattices for energy absorber applications”. Advanced Engineering Materials, 16(3), pp. 276–283.
[17] Deng, B., Raney, J., Tournat, V., and Bertoldi, K., 2017. “Elastic vector solitons in soft architected materials”. Physical Review Letters, 118(204102).
[18] Deng, B., He, P. W. Q., Tournat, V., and Bertoldi, K., 2018. “Metamaterials with amplitude gaps for elastic solitons”. Nature Communications, 9(3410).
[19] Raney, J., Nadkarni, N., Daraio, C., Kochmann, D., Lewis, J., and Bertoldi, K., 2016. “Stable propagation of mechanical signals in soft media using stored elastic energy”. Proceedings of the National Academy of Sciences, 113(35), pp. 9722–9727.
[20] Nadkarni, N., Arrieta, A., Chong, C., Kochmann, D., and Daraio, C., 2016. “Unidirectional transition waves in bistable lattices”. Physical Review Letters, 116.
[21] Kempner, J., 1954. Creep bending and buckling of linearly viscoelastic columns. Technical Note 3136, NASA.
[22] Nachbar, W., and Huang, N., 1967. “Dynamic snapthrough of a simple viscoelastic truss”. Quarterly of Applied Mathematics, 25(1), pp. 65–82.
[23] Santer, M., 2010. “Self-actuated snap back of viscoelastic pulsing structures”. International journal of solids and structures, 47(24), pp. 3263–3271.
[24] Brinkmeyer, A., Santer, M., Pirrera, A., andWeaver, P., 2012. “Pseudo-bistable self-actuated domes for morphing applications”. International Journal of Solids and Structures, 49(9), pp. 1077–1087.
[25] Brinkmeyer, A., Pirrera, A., Santer, M., and Weaver, P., 2013. “Pseudo-bistable pre-stressed morphing composite panels”. International Journal of Solids and Structures,50(7-8), pp. 1033–1043.
[26] Gomez, M., Moulton, D., and Vella, D., 2019. “Dynamics of viscoelastic snap-through”. Journal of Mechanics and Physics of Solids, 124, pp. 781–813.
[27] Urbach, E. Y., and Efrati, E., 2020. “Predicting delayed instabilities in viscoelastic solids”. Science advances, 6(36), p. eabb2948.
[28] Stein-Montalvo, L., Holmes, D. P., and Coupier, G., 2021. “Delayed buckling of spherical shells due to viscoelastic knockdown of the critical load”. arXiv preprint arXiv:2104.02554.
[29] Dykstra, D. M., Busink, J., Ennis, B., and Coulais, C., 2019. “Viscoelastic snapping metamaterials”. Journal of Applied Mechanics, 86(11).
[30] Stern, M., Jayaram, V., and Murugan, A., 2018. “Shaping the topology of folding pathways in mechanical systems”. Nature communications, 9(1), pp. 1–8.
[31] Che, K., Rouleau, M., and Meaud, J., 2019. “Temperature-tunable time-dependent snapping of viscoelastic metastructures with snap-through instabilities”. Extreme Mechanics Letters, 32, p. 100528.
[32] Janbaz, S., Narooei, K., van Manen, T., and Zadpoor, A., 2020. “Strain rate–dependent mechanical metamaterials”. Science advances, 6(25), p. eaba0616.
[33] Bossart, A., Dykstra, D. M., van der Laan, J., and Coulais, C., 2021. “Oligomodal metamaterials with multifunctional mechanics”. Proceedings of the National Academy of Sciences, 118(21).
[34] Bertoldi, K., Vitelli, V., Christensen, J., and Van Hecke, M., 2017. “Flexible mechanical metamaterials”. Nature Reviews Materials, 2(11), pp. 1–11.
[35] Gomez, M., Moulton, D. E., and Vella, D., 2017. “Critical slowing down in purely elastic ‘snapthrough’instabilities”. Nature Physics, 13(2), pp. 142–145.
[36] Forterre, Y., Skotheim, J. M., Dumais, J., and Mahadevan, L., 2005. “How the venus flytrap snaps”. Nature, 433(7024), pp. 421–425.
[37] Smith, M., Yanega, G., and Ruina, A., 2011. “Elastic instability model of rapid beak closure in hummingbirds”. Journal of theoretical biology, 282(1), pp. 41–51.
[38] Janbaz, S., Bobbert, F., Mirzaali, M., and Zadpoor, A., 2019. “Ultra-programmable buckling-driven soft cellular mechanisms”. Materials Horizons, 6(6), pp. 1138–1147.
[39] Park, S. J., Shin, J., Magagnosc, D. J., Kim, S., Cao, C., Turner, K. T., Purohit, P. K., Gianola, D. S., and Hart, A. J., 2020. “Strong, ultralight nanofoams with extreme recovery and dissipation by manipulation of internal adhesive contacts”. ACS nano, 14(7), pp. 8383–8391.
[40] Brandenbourger, M., Locsin, X., Lerner, E., and Coulais, C., 2019. “Non-reciprocal robotic metamaterials”. Nature communications, 10(1), pp. 1–8.
[41] Zhou, X., Yu, D., Shao, X., Zhang, S., and Wang, S., 2016. “Research and applications of viscoelastic vibration damping materials: A review”. Composite Structures, 136, pp. 460–480.
[42] Vasios, N., Gross, A. J., Soifer, S., Overvelde, J. T., and Bertoldi, K., 2020. “Harnessing viscous flow to simplify the actuation of fluidic soft robots”. Soft robotics, 7(1), pp. 1–9.
{kind=link}
{kind=link}
One youtube videos on Ref [32
One youtube videos on Ref [32]
https://www.youtube.com/embed/jzjT_67gfPA
and on Ref [33]
https://www.youtube.com/embed/hvQaa7NR29A