
Cylindrical Origami: From Foldable Structures to Versatile Robots
Zhuang Zhang, Hanqing Jiang
School of Engineering, Westlake University, China.
1. Introduction
Origami, the ancient paper art that was originated from East Asia, has drawn increasing attention among mathematicians, physicists, artists, and engineers, who have utilized origami as a tool to transform simple, two-dimensional thin-film materials into complex, three-dimensional structures. These origami structures exhibit fascinating properties, such as shape-morphing, flexibility, scalability, reconfigurability, multi-stability, and stiffness/Poisson’s ratio tunability. These versatile functions have prompted origami structures to be applied in many fields, including flexible electronics[1], medical devices[2], spacecrafts[3], transforming architectures[4], metamaterials[5, 6], and of special interest here, robotics[7]. Origami robots, whose morphology and function are generated by folding, are robots consisting of discrete facets and creases. Compared with conventional rigid robots, origami robots exhibit inherent compliance through their foldable structures, and simplify the design and fabrication processes by avoiding assembly of machinery parts through folding. On the other hand, compared with soft robots, origami robots can be constructed with rigid materials without losing their shape-morphing capability, exhibiting soft-rigid hybrid structures and functions. In addition to reconfigurable robotic sheets with repeating units, there are several recent studies focused on cylindrical origami robots. The cylindrical structures make origami robots more stereoscopic, similar to soft actuators and structural members in rigid robots. Moreover, the cylindrical structures allow robots to be actuated globally, rather than actuated locally by built-in joint actuators.
In this journal club, we would like to initiate the discussion on cylindrical origami robots by sharing recent progress in this area, including our recent work in this topic.
2. Foldable Cylindrical Origami Structures
Folding a cylindrical shell along the axial direction represents a basic motion of foldable structures, which leads to many applications, such as deployable structures, spacecrafts, and packaging[3, 8]. Generally, in robotic systems, origami structures can be employed as skeletons and provide kinematic constraints. Thus, the folded shapes and the folding processes of origami structures define the expected functions of specific robots. Here, we first introduce four typical cylindrical origami patterns.
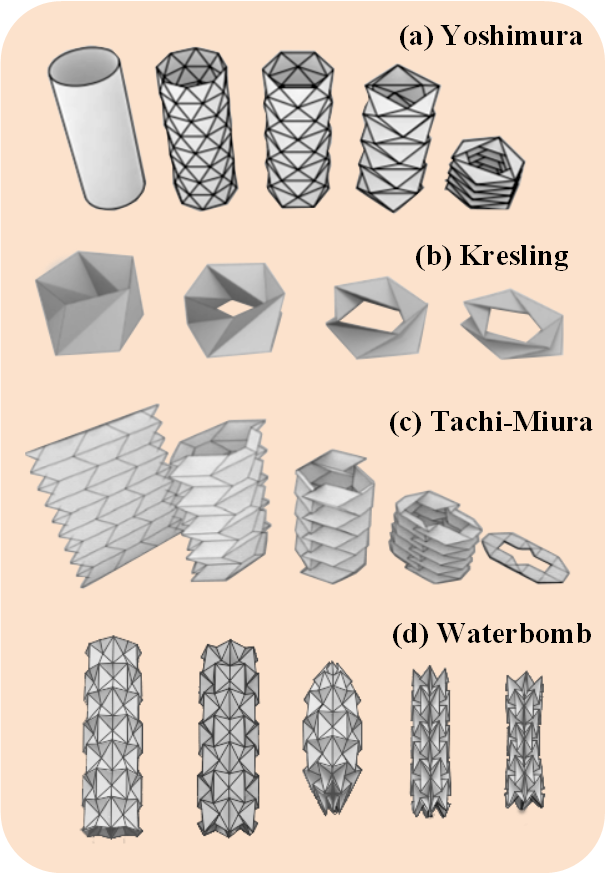
Yoshimura pattern:
As the inextensional post-buckling solution for a thin-walled cylinder under axial compressing, the Yoshimura pattern[9] (Fig. 1a) is the one of the most well-known cylindrical origami patterns. This pattern consists of the repetition of the diamond pattern and forms a circumferentially closed structure. However, the Yoshimura pattern is actually a stable structure rather than a foldable one, meaning when all the geometric parameters are defined, the pattern is entirely rigid. Hence, this pattern is a deformable origami whose axial folding is on the basis of the structural deformation. Accordingly, most existing robotic designs with Yoshimura pattern employ low-stiffness shells like laser-machined paper sheets or polymers (e.g. PET, PTFE). The low-stiffness shells can be readily compressed during the folding process. Then, in addition to contraction/extension, the Yoshimura pattern can be utilized to build 3-DoF robots that can achieve omnidirectional bending, due to its centrosymmetric, flexible structure. Another characteristic of this pattern is its high torsional stiffness.
Kresling pattern:
The Kresling pattern (Fig. 1b) can be obtained by the natural result of twisting a thin-walled cylinder until it buckles[10]. Thus, it exhibits coupled compressing-twisting deformation. This pattern consists of the repetition of triangulated unit cells with the same geometric parameters. Similar to the Yoshimura pattern, the Kresling pattern is also a deformable origami. However, it has more unusual mechanical properties, such as bi-stability and tunable stiffness. These properties make the Kresling pattern draw increasing attention in recent years. Actually, this pattern can exhibit either mono-stability or bi-stability through tuning the geometry and material properties. It can also execute bending motion, when constructed by low-stiffness materials with proper geometry.
Tachi–Miura pattern:
The Miura pattern is the best-known one-DoF rigid origami, which has four creases per vertex[11]. A flat Miura pattern has many unique yet intrinsic mechanical properties during folding and unfolding, such as tunable Poisson’s ratio and stiffness. In order to take advantage of Miura-ori features, the Tachi–Miura polyhedron (TMP) was proposed[8]. The TMP (Fig. 1c) can be fabricated by connecting two identical papers with different patterns. This pattern can be constructed by rigid panels and generate a strict axial folding, while the deformation only occurs along the crease lines. Nevertheless, as shown in Fig. 1c, the cross section of the TMP keeps changing during the folding process, rendering it hard to form a sealed structure. Until now, few origami robots are designed based on the TMP, due to these characteristics.
Waterbomb pattern:
Another well-known cylindrical rigid origami is the Waterbomb pattern (Fig. 1d), whose unit cell has six or eight creases on each vertex. The unit cell of the eight-crease Waterbomb origami has bi-stability and can represent binary states by upward and downward folding. The six-crease unit cell is commonly utilized to construct multi-DoF cylindrical origami with various folding modes. It can either perform negative Poisson’s ratio or change its radius significantly[12]. Several robotic designs have been proposed based on the Waterbomb pattern to achieve a high morphing range. Moreover, since the kinematics of the six-crease unit cell can be analyzed through the mechanism-equivalent approach[13], cylindrical Waterbomb pattern with three unit cell limbs has been used to build parallel robots.
Figure 1: Cylindrical origami patterns (images reproduced based on [8, 12, 26])
3. Versatile Cylindrical Origami Robots
Benefitting from the high morphing range and the mechanical properties of the cylindrical origami patterns introduced above, a variety of novel robots have been proposed in recent years. We will further classify and discuss the current designs in the following, according to the applications.
Locomotion:
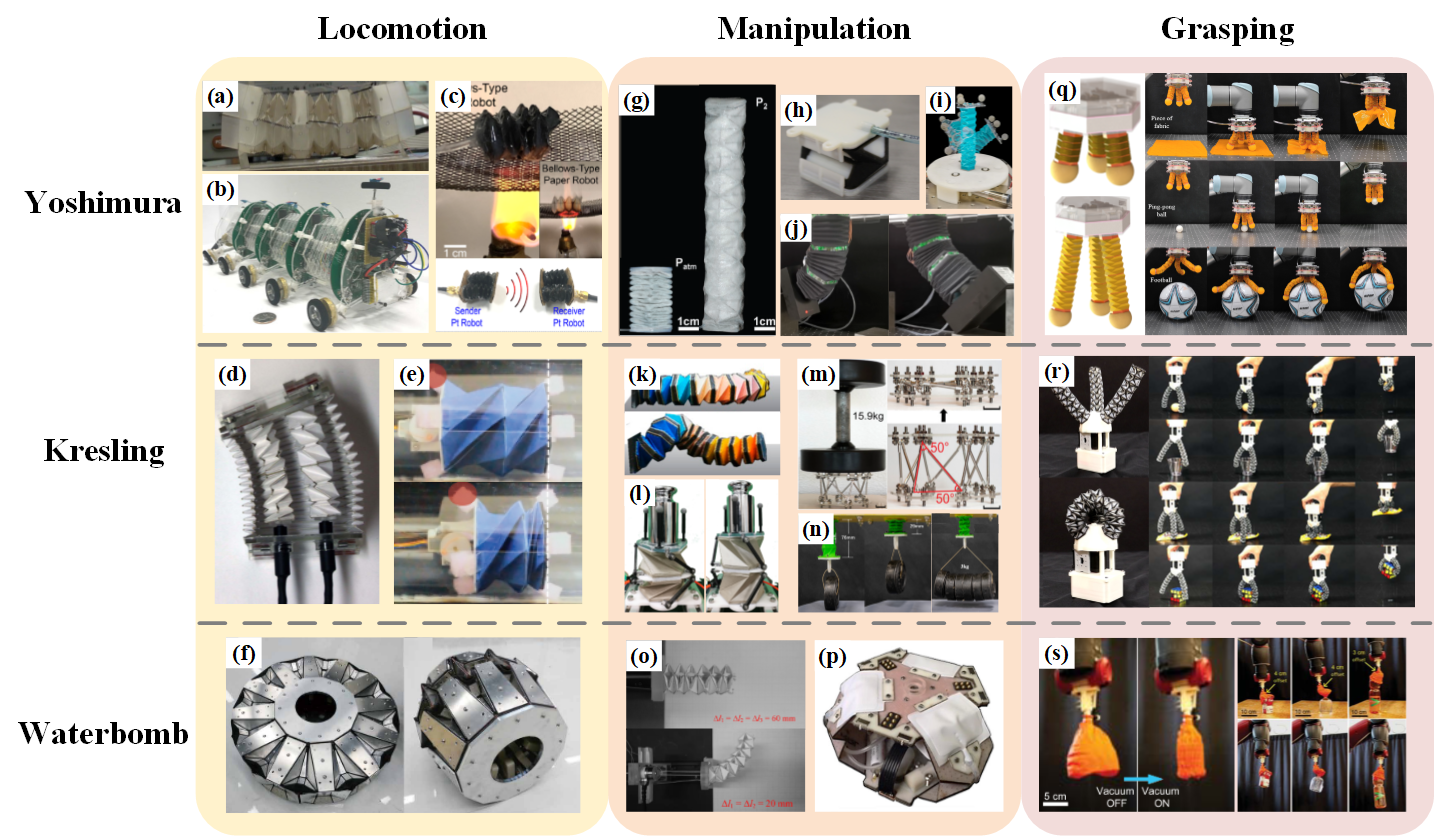
Over the years, plenty of soft robotic designs that employ structures similar to arthropods have been proposed for locomotion tasks. Since either caterpillars or worms exhibit cylindrical structures, cylindrical origami robots with multi-DoF have been applied for locomotion. Onal et al. proposed a pioneer work in this area[14]. They utilized laser-machined polymer films to build manually folded Yoshimura and Waterbomb patterns. NiTi coil actuators (namely, SMA) were placed on the bodies and controlled the axial folding/deployment of the origamis to execute worm-like peristaltic locomotion (Fig. 2a). Later, several peristaltic robots with similar design principles were proposed[15-17]; servo motors were utilized to control the morphing of the paper-based origami bodies through cables and springs. Tawfick et al. harnessed the coupled compressing-twisting deformation of the Kresling pattern to build an origami crawling robot[18]. The multi-story Kresling tower transformed motor rotation to linear motion and enabled a crawling gait (Fig. 2d). On the basis of their prior work, Onal et al. also proposed a cable-driven design with Yoshimura pattern[19]. To increase the motion speed, wheels were added to make the movement more like a snake rather than a worm (Fig. 2b). Chen et al. proposed an origami crawling robot with a similar motion type (Fig. 2c); furthermore, the Pt-elastomer obtained from a graphene oxide-enabled templating synthesis realized a tight integration of actuation, sensing, and wireless communication[20]. In addition to crawling locomotion, a tunable robotic wheel was proposed to adapt to different road conditions (Fig. 2f), in which the shape-shifting wheels implemented by Waterbomb origami can change their radius due to the rich DoF of the latter[21]. Except for land locomotion, we proposed a swimming robot based on the curved Miura pattern[22]. The curved origami pattern can execute in-situ stiffness manipulation, rendering various responses of the robot under the actuation of a simple pneumatic balloon. It is noteworthy that the curved pattern we currently used was in a 3D panel shape; it can also be constructed in a cylindrical structure. In addition, there seems to be no aerial robotic design based on cylindrical origami, except for an attempt that connects an origami robotic arm with a UAV[23].
Manipulation:
Since cylindrical origami robots exhibit similar structures to soft actuators or rigid robotic links, actuation/manipulation should be the most proper, straightforward application. One of the early attempts in this area was made by Whitesides et al.[24]. The design and fabrication techniques of soft pneumatic actuators (SPAs) were harnessed to design various kinds of elastomeric origami actuators. The embedded origami sheets introduced anisotropy into silicone rubber-based SPAs, enhancing the stiffness and the motion range (Fig. 2g). Benefitting from the sealable structure of the deformable origami (i.e. Yoshimura and Kresling pattern), pneumatic origami actuators/robots can be readily constructed without silicone rubber. Schmitt et al. utilized multi-material 3D printing to build a pneumatic actuator with Yoshimura pattern (Fig. 2h), which can generate linear extension and force under the actuation of positive pressure[25]. In contrast, we proposed a 3D-printed origami actuator that can exhibit fast and powerful linear motion, actuated by negative pressure[26] (Fig. 2n). The Kresling pattern was adopted to obtain a larger stroke; though its mechanical properties were not harnessed. In order to exert the mechanical properties of the Kresling pattern, we created a truss-based mechanical metamaterial for on-demand deployability and tunable stiffness[27]. This metamaterial can exhibit either a collapsible state with low stiffness or a non-collapsible state with high stiffness. In the load-bearing state, the prototype can hold 1,600 times its own weight (Fig. 2m). Besides, Bertoldi et al. made full use of the bi-stability of a specific origami structure possessing a similar principle with the Kresling pattern, to build multistable inflatable structures at the metre scale[28]. Although the deployment of their design was still triggered by pneumatic pressure, the origami structures can stably lock in place after removing the actuation source. Note that all the pneumatic origami robots introduced above are globally actuated, resulting in prescribed, unimodal motion upon inflation/deflation. Paik et al. proposed a locally actuated pneumatic origami robot[29]. Pouch motors are discretely distributed on the creases of a Waterbomb pattern with three unit cell limbs (Fig. 2p); then, 3-DoF motion can be exhibited.
In addition to pneumatic actuation, cable-driven mechanism has also been reported to achieve manipulation of origami robots[13, 30-32]. In these works, three or four motors were utilized to winding the cables throughout the origami structure, so that contraction/extension and omnidirectional bending can be realized (Fig. 2o). These origami robots exhibit continuum structures; various multi-story patterns have been adopted, including Yoshimura, Kresling, Waterbomb and Twisted Tower (similar to Kresling). Note that the cable only provides unidirectional constraint (tension). These designs either utilized origami structures as springs or integrated additional springs to keep the cables in tension. To solve this problem, we proposed a hybrid actuation strategy, consisting of positive pneumatic pressure and cable. With the antagonistic actuation of cable-pulling and air-pushing, the actuator with Kresling pattern can perform bidirectional linear motion with variable stiffness[33] (Fig. 2l). A 3-DoF actuator has also been proposed based on the Yoshimura pattern, with three individually controlled cables and one pneumatic input[34] (Fig. 2i). Recently, we have also proposed a 3-DoF origami actuator with inner-rigid/outer-soft hybrid structure, in order to further enhance the load-carrying capability and positioning accuracy of origami robots for manipulation[35] (Fig. 2j). Apart from pneumatic and cable-driven control, a wireless, distributed, magnetic control strategy was proposed by Zhao and Paulino[36, 37]. Their slender robotic arm based on the Kresling pattern can exhibit dexterous stretching, bending, and twisting by controlling the magnetic field (Fig. 2k).
Grasping:
Quite a few delicate robotic gripper designs have been proposed, based on planar origami patterns[22, 38, 39]. In contrast, fewer designs are based on their cylindrical counterparts. Cylindrical origami has a more similar structure with animal fingers; it thus deserves to be further investigated. Li et al. harnessed the radius-changing property of the Waterbomb origami and built a vacuum-driven lightweight gripper[40]. Due to the reconfigurable origami chamber and the negative pressure, their gripper can lift a variety of objects and even heavy objects up to 120 times its weight (Fig. 2s). Lee et al. expanded their prior designs in paper-based Twisted Tower origami crawling robots[15] and manipulators[31], proposing a three-finger gripper based on multi-material 3D printing[41]. This underactuated gripper has only one cable in each finger, while the three cables are winded by a single servo motor (Fig. 2r). Only bending motion of the fingers is actively controlled, while the passive twisting results in passive compliance and adaptable grasping capability. Note that most existing designs of both rigid and soft grippers possess fixed sizes and prescribed grasping range. Thus, a tunable finger size will lead to a variable grasping range. Recently, we are working on an origami gripper with tunable finger length[42]. Based on the foldable Yoshimura pattern, this gripper can actively adjust its effective length according to the sizes of the objects. As a result, both ping-pong ball and football can be stably grasped (Fig. 2q).
Figure 2: Robots based on cylindrical origami (images adopted from [13, 14, 17-21, 24-27, 29, 33-37, 40-42]).
4. Summary and Outlook
The integration of cylindrical origami structures into soft/rigid-soft hybrid robotic systems is now starting to show its potential with reconfigurability, large stroke, structural compliance, and various mechanical properties. However, this field is still in its infancy stage with many unexplored topics. For example, none of the origami locomotion robots mentioned above demonstrated a high motion speed. As to the origami actuators and manipulators, very few designs demonstrated the positioning accuracy and load-carrying capability, which are important figure for field applications. Moreover, there are still numerous vacancies in the field of grasping, and even medical devices (not introduced here). In consideration of the current progress on both foldable origami structures and versatile origami robots, from our point of view, further improvements are desired in design, actuation, and sensing. First, it can be noticed that most existing cylindrical origami robots are designed based on these three well-known patterns, while few attempts have been reported to change the commonly used patterns. Some modifications or newly design origami patterns may bring in new functions. Further, most current robotic designs only exploit the shape-morphing, flexibility, and scalability of the origami structures. The mechanical properties, such as tunable stiffness[27] and multi-stability[28], are not fully explored. Moreover, the actuation methods of the current designs mainly include cable-driven, fluid-driven, and heating SMA. Although magnetic actuation has been proposed[36, 37], more actuation methods based on smart materials are awaiting exploration, as what is happening in the field of soft robotics. In addition, the integration of sensing into cylindrical origami robots and even designs of origami sensors are rare. This field is of great significance and worth of more thorough investigation.
Here, we invite all researchers active in this field or have a general interest in smart materials, mechanical metamaterials, and soft robots to share their perspectives. Introducing their recent progress related to this subject is also highly welcomed. We are looking forward to a fruitful discussion.
Reference
[1] Z. Song et al., "Origami lithium-ion batteries," Nature Communications, vol. 5, no. 1, p. 3140, 2014/01/28 2014, doi: https://doi.org/10.1038/ncomms4140.
[2] A. R. Ahmed, O. C. Gauntlett, and G. Camci-Unal, "Origami-Inspired Approaches for Biomedical Applications," ACS Omega, vol. 6, no. 1, pp. 46-54, 2021/01/12 2021, doi: https://doi.org/10.1021/acsomega.0c05275.
[3] M. Schenk, A. D. Viquerat, K. A. Seffen, and S. D. Guest, "Review of Inflatable Booms for Deployable Space Structures: Packing and Rigidization," Journal of Spacecraft and Rockets, vol. 51, no. 3, pp. 762-778, 2014, doi: https://doi.org/10.2514/1.A32598.
[4] P. M. Reis, F. López Jiménez, and J. Marthelot, "Transforming architectures inspired by origami," Proceedings of the National Academy of Sciences, vol. 112, no. 40, pp. 12234-12235, 2015, doi: https://doi.org/10.1073/pnas.1516974112.
[5] Z. Zhai, L. Wu, and H. Jiang, "Mechanical metamaterials based on origami and kirigami," Applied Physics Reviews, vol. 8, no. 4, p. 041319, 2021, doi: https://doi.org/10.1063/5.0051088.
[6] W. Liu, H. Jiang, and Y. Chen, "3D Programmable Metamaterials Based on Reconfigurable Mechanism Modules," Advanced Functional Materials, vol. n/a, no. n/a, p. 2109865, 2021, doi: https://doi.org/10.1002/adfm.202109865.
[7] D. Rus and C. Sung, "Spotlight on origami robots," Science Robotics, vol. 3, no. 15, Feb 28 2018, doi: https://doi.org/10.1126/scirobotics.aat0938.
[8] K. Miura and T. Tachi, "Synthesis of rigid-foldable cylindrical polyhedra," Symmetry: Art and Science, pp. 204-213, 2010.
[9] Y. Yoshimura, "On the mechanism of buckling of a circular cylindrical shell under axial compression," 1955.
[10] B. Kresling, "Origami-structures in nature: lessons in designing “smart” materials," MRS Proceedings, vol. 1420, pp. mrsf11-1420-oo02-01, 2012, Art no. mrsf11-1420-oo02-01, doi: https://doi.org/10.1557/opl.2012.536.
[11] K. Miura, Zeta-Core Sandwich- Its Concept and Realization. Institute of Space and Aeronautical Science, University of Tokyo, 1972.
[12] J. Ma, H. Feng, Y. Chen, D. Hou, and Z. You, "Folding of Tubular Waterbomb," Research, vol. 2020, p. 1735081, 2020/04/10 2020, doi: https://doi.org/10.34133/2020/1735081.
[13] K. Zhang, C. Qiu, and J. S. Dai, "An Extensible Continuum Robot With Integrated Origami Parallel Modules," Journal of Mechanisms and Robotics, vol. 8, no. 3, 2016, doi: https://doi.org/10.1115/1.4031808.
[14] C. D. Onal, R. J. Wood, and D. Rus, "An Origami-Inspired Approach to Worm Robots," IEEE/ASME Transactions on Mechatronics, vol. 18, no. 2, pp. 430-438, 2013, doi: https://doi.org/10.1109/tmech.2012.2210239.
[15] E. V. Hoff, J. Donghwa, and L. Kiju, "OrigamiBot-I: A thread-actuated origami robot for manipulation and locomotion," in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014, pp. 1421-1426, doi: https://doi.org/10.1109/IROS.2014.6942743.
[16] H. Banerjee, N. Pusalkar, and H. Ren, "Single-Motor Controlled Tendon-Driven Peristaltic Soft Origami Robot," Journal of Mechanisms and Robotics, vol. 10, no. 6, 2018, doi: https://doi.org/10.1115/1.4041200.
[17] P. Bhovad, J. Kaufmann, and S. Li, "Peristaltic locomotion without digital controllers: Exploiting multi-stability in origami to coordinate robotic motion," Extreme Mechanics Letters, vol. 32, 2019, doi: https://doi.org/10.1016/j.eml.2019.100552.
[18] A. Pagano, T. Yan, B. Chien, A. Wissa, and S. Tawfick, "A crawling robot driven by multi-stable origami," Smart Materials and Structures, vol. 26, no. 9, 2017, doi: https://doi.org/10.1088/1361-665X/aa721e.
[19] M. Luo et al., "OriSnake: Design, Fabrication, and Experimental Analysis of a 3-D Origami Snake Robot," IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1993-1999, 2018, doi: https://doi.org/10.1109/lra.2018.2800112.
[20] H. Yang et al., "Multifunctional metallic backbones for origami robotics with strain sensing and wireless communication capabilities," Science Robotics, vol. 4, no. 33, Aug 28 2019, doi: https://doi.org/10.1126/scirobotics.aax7020.
[21] D. Y. Lee, J. K. Kim, C. Y. Sohn, J. M. Heo, and K. J. Cho, "High-load capacity origami transformable wheel," Science Robotics, vol. 6, no. 53, Apr 7 2021, doi: https://doi.org/abe020110.1126/scirobotics.abe0201.
[22] Z. Zhai, Y. Wang, K. Lin, L. Wu, and H. Jiang, "In situ stiffness manipulation using elegant curved origami," Science Advances, vol. 6, no. 47, p. eabe2000, 2020, doi: https://doi.org/10.1126/sciadv.abe2000.
[23] S. J. Kim, D. Y. Lee, G. P. Jung, and K. J. Cho, "An origami-inspired, self-locking robotic arm that can be folded flat," (in English), Science Robotics, vol. 3, no. 16, 2018, doi: https://doi.org/10.1126/scirobotics.aar2915.
[24] R. V. Martinez, C. R. Fish, X. Chen, and G. M. Whitesides, "Elastomeric Origami: Programmable Paper-Elastomer Composites as Pneumatic Actuators," Advanced Functional Materials, vol. 22, no. 7, pp. 1376-1384, 2012, doi: https://doi.org/10.1002/adfm.201102978.
[25] F. Schmitt, O. Piccin, L. Barbé, and B. Bayle, "An origami-inspired flexible pneumatic actuator," in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018: IEEE, pp. 436-441.
[26] Z. Zhang, W. Fan, G. Chen, J. Luo, Q. Lu, and H. Wang, "A 3D Printable Origami Vacuum Pneumatic Artificial Muscle with Fast and Powerful Motion," in 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 12-16 April 2021 2021, pp. 551-554, doi: https://doi.org/10.1109/RoboSoft51838.2021.9479194.
[27] Z. Zhai, Y. Wang, and H. Jiang, "Origami-inspired, on-demand deployable and collapsible mechanical metamaterials with tunable stiffness," Proceedings of the National Academy of Sciences, vol. 115, no. 9, pp. 2032-2037, 2018, doi: https://doi.org/10.1073/pnas.1720171115.
[28] D. Melancon, B. Gorissen, C. J. Garcia-Mora, C. Hoberman, and K. Bertoldi, "Multistable inflatable origami structures at the metre scale," Nature, vol. 592, no. 7855, pp. 545-550, Apr 2021, doi: https://doi.org/10.1038/s41586-021-03407-4.
[29] M. A. Robertson, O. C. Kara, and J. Paik, "Soft pneumatic actuator-driven origami-inspired modular robotic “pneumagami”," The International Journal of Robotics Research, vol. 40, no. 1, pp. 72-85, 2020, doi: https://doi.org/10.1177/0278364920909905.
[30] J. Santoso, E. H. Skorina, M. Luo, R. B. Yan, and C. D. Onal, "Design and Analysis of an Origami Continuum Manipulation Module with Torsional Strength," in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 2098-2104.
[31] D. Jeong and K. Lee, "Design and analysis of an origami-based three-finger manipulator," (in English), Robotica, vol. 36, no. 2, pp. 261-274, Feb 2018, doi: https://doi.org/10.1017/S0263574717000340.
[32] J. Kaufmann, P. Bhovad, and S. Li, "Harnessing the Multistability of Kresling Origami for Reconfigurable Articulation in Soft Robotic Arms," Soft Robotics, Feb 26 2021, doi: https://doi.org/10.1089/soro.2020.0075.
[33] Z. Zhang, G. L. Chen, H. Y. Wu, L. Y. Kong, and H. Wang, "A Pneumatic/Cable-Driven Hybrid Linear Actuator With Combined Structure of Origami Chambers and Deployable Mechanism," (in English), IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3564-3571, Apr 2020, doi: https://doi.org/10.1109/Lra.2020.2976324.
[34] Z. Zhang, S. Tang, W. Fan, Y. Xun, H. Wang, and G. Chen, "Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections," Mechanism and Machine Theory, vol. 169, p. 104607, 2022/03/01/ 2022, doi: https://doi.org/10.1016/j.mechmachtheory.2021.104607.
[35] Z. Zhang, G. Chen, Y. Xun, J. Wang, H. Wang, and J. Angeles, "Bioinspired Rigid-Soft Hybrid Origami Actuator with Controllable Versatile Motion and Variable Stiffness," (under review).
[36] L. S. Novelino, Q. Ze, S. Wu, G. H. Paulino, and R. Zhao, "Untethered control of functional origami microrobots with distributed actuation," Proceedings of the National Academy of Sciences, vol. 117, no. 39, pp. 24096-24101, Sep 29 2020, doi: https://doi.org/10.1073/pnas.2013292117.
[37] S. Wu, Q. Ze, J. Dai, N. Udipi, G. H. Paulino, and R. Zhao, "Stretchable origami robotic arm with omnidirectional bending and twisting," Proceedings of the National Academy of Sciences, vol. 118, no. 36, Sep 7 2021, doi: https://doi.org/10.1073/pnas.2110023118.
[38] J. A. Faber, A. F. Arrieta, and A. R. Studart, "Bioinspired spring origami," Science, vol. 359, no. 6382, pp. 1386-1391, Mar 23 2018, doi: https://doi.org/10.1126/science.aap7753.
[39] S. Mintchev, J. Shintake, and D. Floreano, "Bioinspired dual-stiffness origami," Science Robotics, vol. 3, no. 20, Jul 25 2018, doi: https://doi.org/10.1126/scirobotics.aau0275.
[40] S. Li et al., "A Vacuum-driven Origami "Magic-ball" Soft Gripper," in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 7401-7408.
[41] K. Lee, Y. Wang, and C. Zheng, "TWISTER Hand: Underactuated Robotic Gripper Inspired by Origami Twisted Tower," IEEE Transactions on Robotics, vol. 36, no. 2, pp. 488-500, 2020, doi: https://doi.org/10.1109/tro.2019.2956870.
[42] Z. Zhang, W. Fan, J. Luo, H. Wang, G. Chen, and H. Jiang, "Hybrid-Driven Origami Gripper with Variable Stiffness and Finger Length," (in preparation).
| Attachment | Size |
|---|---|
| Figure1.png | 271.36 KB |
| Figure2.png | 1.45 MB |
{kind=link}
{kind=link}
strength of the foldable structures
Dear Hanqing,
Thanks for posting a very interesting topic. These foldable structures are not load-bearing structures so you mainly focus on their deformation and stiffness, not strength. I find one sentence which was related to strength, “In the load-bearing state, the prototype can hold 1,600 times its own weight (Fig. 2m).”
What is the constraining to prevent strength increasing of the prototype? For example, the strength of a composite laminate is mainly determined by its fiber strength.
Roy
they are metamaterials
Hi Roy,
Thanks for the comment. These origami patterns are metamaterials and their strength is mainly determined by how they are folded. For the pattern you are referring to, the folding pattern defines its load-bearing capability as the critical load for buckling of the inclined spring-in-a-tube structure.
Hanqing