
3D Printing of Soft Materials
Qi (Kevin) Ge
Department of Mechanical and Energy Engineering
Sourthern University of Science and Technology, Shenzhen, China
1. Introduction
Soft materials such as rubbers, gels, biomaterials are ubiquitous in nature. Compared with their hard counterparts, soft materials usually exhibit unique nonlinear mechanical behavior with large deformation. In addition, there are a type of attractive functional soft materials that have the ability to undergo large mechanical deformation in response to external stimuli such as heat, moisture, electric/magnetic field, light. Those functional soft materials are now well known as soft active materials (SAMs), and the representative examples include shape memory polymers (SMPs) [1, 2], hydrogels [3-5], dielectric elastomers [6, 7], liquid crystal elastomers [8, 9], light responsive materials [10-12] , magnetic responsive materials [13-15].
In recent years, soft materials have been studied intensively. The studies on soft materials are not only focused on the understanding and modeling of the unique mechanical behavior of soft materials, but also the explorations of their potential but impactful applications. For examples, elastomers have been widely used to fabricate soft robots; SMPs have demonstrated great potentials in space deployable structures [16] and minimally invasive surgical devices [17]; hydrogels have been successfully applied to make implants [18], bioadhesives [19], bioelectronics[19]; dielectronic elastomers, liquid crystal elastomers, magnetic/light responsive materials have shown their possibilities in the applications of soft robotics [7, 9, 11, 14].
Despite of the recent rapid progresses on theoretical studies and application explorations of soft materials, the manufacturing approaches applied to fabricate soft material structures and devices are mainly restricted to the traditional manufacturing approaches, which greatly limit the functionality and performance of structures and devices made of soft materials. Therefore, it is desired to develop an effective approach that fabricates soft material structures with high design freedom and rich material choice.
Additive manufacturing (AM) also known as 3D printing allows the creation of complex 3D geometries with precisely prescribed microarchitectures, which enable new functionalities or improved performance. Therefore, 3D printing is also considered as an ideal tool to manufacture multifunctional structures and devices made of soft materials. In this month’s journal club, I would like to initiate the discussion on 3D printing of soft materials by sharing our group’s recent research outcomes in this area.
2. Shape Memory Polymers
2.1 Shape Memory Polymers for 4D Printing
“4D printing”, an emerging 3D printing technology that creates 3D structure whose configuration can change over the fourth dimension-“time” in response to environmental stimuli, was firstly proposed by Tibbits at a 2013 TED Talk [20]. Soon after, we published the first research paper on 4D printing in 2013 by using the concept of printed active composites (PACs) where a printed composite sheet can transform into a complex geometry upon heating due to the shape memory effect of the printed shape memory fibers [21]. 4D printing is realized by 3D printing structures that are made of soft active materials (SAMs) which could actively perform large deformation in response to environmental stimulus such as heat, moisture, light, electric current, voltage, magnetic field and others. The most commonly used SAMs in 3D printing include SMPs [21-27], hydrogels [28-30], liquid crystal elastomers [31-34], magnetic responsive materials [14, 35].
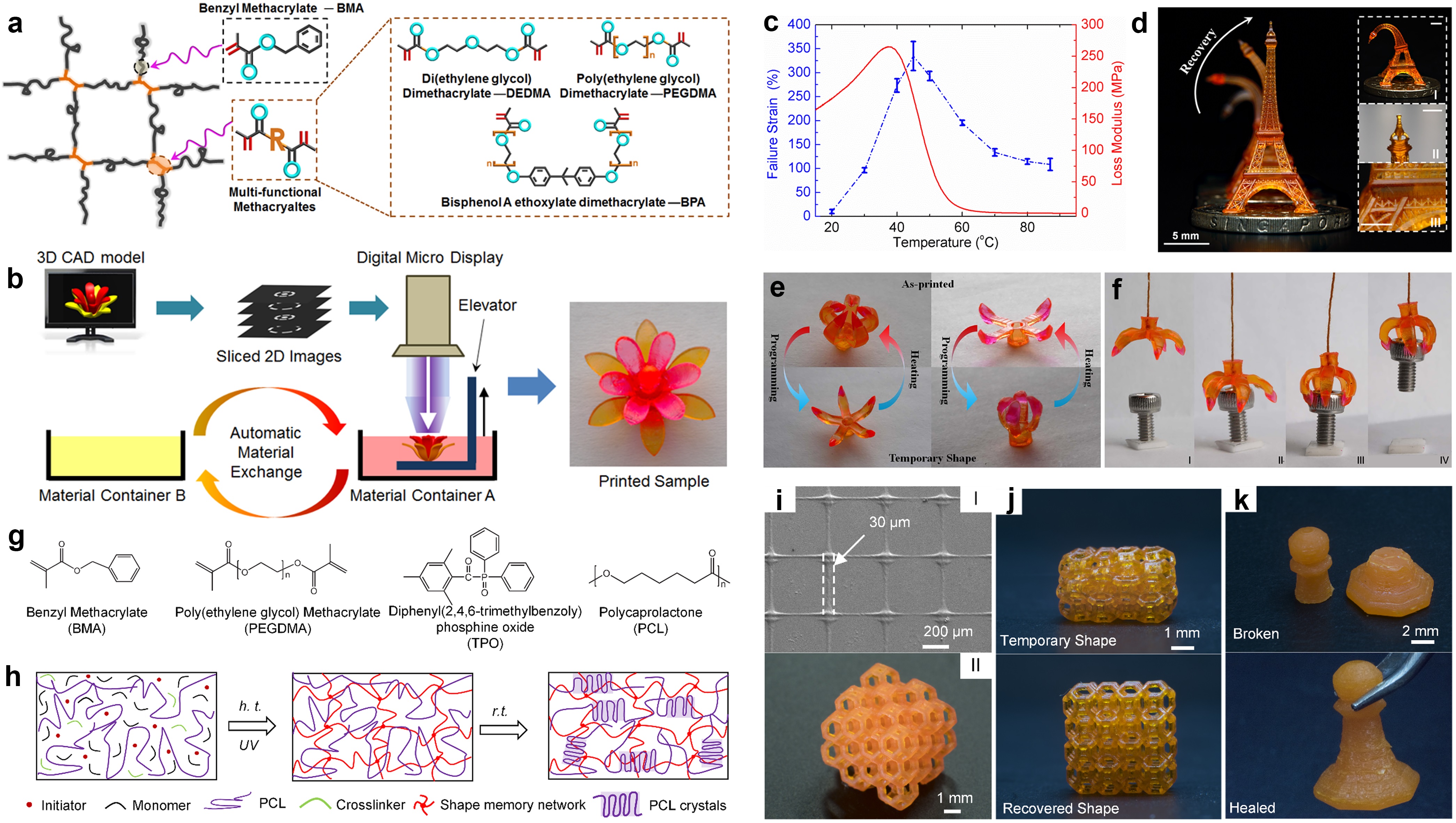
The early attempts on 4D printing mainly relied on a commercial multimaterial PolyJet 3D printer (ObJet, Stratasys, MN, USA) which has the limitations including low mechanical performance of the printing materials provided by the supplier, untailorable 3D printing materials, and relatively low planar printing resolution (~200 µm) [36]. To address these limitations, we developed a highly tailorable (meth)acrylate based SMP system (Figure 1a) [23]. Since it is UV curable, thus comparable with Digital Light Processing (DLP)-based high resolution 3D printing (Figure 1b) which fabricates 3D structures by projecting a sequence of 2D patterns on the surface of polymer resin to trigger localized photopolymerization that converts liquid resin to solid patterns. The (meth)acrylate based SMPs have high tailorablility allowing users to freely tune thermomechanical properties. The research found that the optimized SMP can be stretched by more than 300% (Figure 1c). The high deformability and compatibility with DLP-based 3D printing enables the 4D printing with large deformation and high resolution (Figure 1d). Moreover, we used multimaterial DLP-based 3D printing to fabricate a micro gripper (Figure 1e) where the hinges were SMP and the tips were a soft material (Figure 1f). In addition, to make the chemically crosslinked SMP network self-healable, a UV curable double-network SMP system for self-healing 4D printing was developed [37]. As shown in Figure 1g, the system include benzyl methacrylate as monomer, and poly(ethylene glycol)-dimethacrylate (PEGDMA) as crosslinker to form a 3D printable and highly deformable SMP network; polycaprolactone (PCL) as self-healing agent (Figure 1h) incorporated into the network system to impart the self-healing ability to the 4D-printed structures (Figure 1i-k).
Figure 1. UV curable shape memory polymers for 4D printing. (a)-(f) Highly tailorable (meth)acrylate based SMP system compatible with DLP-based 3D printer. (a) Chemicals for preparing (meth)acrylate based UV curable SMP resin. (b) A workflow illustrates the DLP-based multimaterial 3D printing process. (c) The temperature effect on the failure strain of the SMP system. (d) 3D printed SM Eiffel tower. (e) The demonstration of the transition between as printed shape and temporary shape of multimaterial grippers. (f) The snapshots of the process of grabbing an object. (g)-(k) UV curable double network SMP system for self-healing 4D printing. (g) Chemical structures of the components in self-healing SMP resin. (h) Chemical structure evolution of the self-healing SMP solution during DLP-based 3D printing at high temperature (h.t.) and cooling down to room temperature (r.t.). (i) High-resolution complex 3D structures printed using self-healing SMP solution. (j) Demonstration of 4D printing: temporary shape (top) and permanent shape (down) of 3D printed Kelvin foam; (k) Demonstration of the self-healing ability of the printed 3D structure: the broken chess piece (top) can be healed together (down) by heating at 80°C for 5 minutes.
2.2 Shape Memory Polymers for Stiffness-Variable Soft Robots
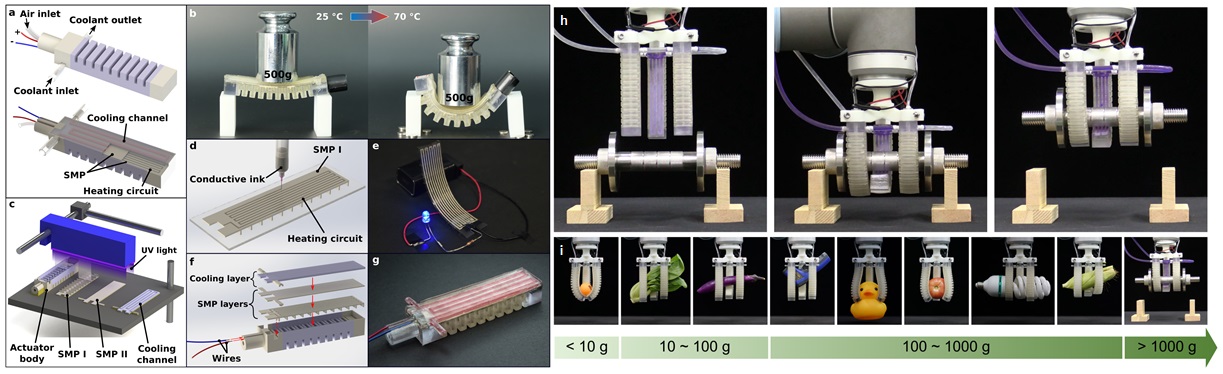
Soft robots have the appealing advantages of being highly flexible and adaptive to complex environments. However, the low-stiffness nature of the constituent materials makes soft robotic systems incompetent in tasks requiring relatively high load capacity. To address this challenge, we developed a paradigm to design and manufacture a type of Fast-Response, Stiffness-Tunable (FRST) soft actuator (Figure 2a and b) using hybrid multimaterial 3D printing technologies (Figure 2c). Figure 2c present the schematic of the fully 3D printed FRST soft actuator with a pneumatic body and an embedded SMP inextensible layer. The integration of the SMP not only maintains the flexibility and adaptability of the actuator (when the SMP layer is soft at 70 °C), but also significantly enhances the stiffness of the FRST actuator (when the SMP layer becomes stiff at 25 °C) by up to about 120 times compared with that of its purely elastomeric counterpart. Figure 2b, we demonstrate the stiff-soft duality of the FRST actuator by placing a 500 g weight on its inextensible layer side. At room temperature, it is stiff enough to support the weight; while at 70 °C, it becomes soft, and the weight leads to a large bending of the actuator. Besides the stiffness tunability, more importantly, the FRST actuator demonstrates fast response rates in heating and cooling. It can reversibly switch its stiffness between 10 MPa and ~1 GPa within 32 seconds. The fast heating with a rate of 4.5 °C/s (i.e. heating from 25 °C to 70 °C within 10 seconds) was realized through printing a deformable, conductive Joule-heating circuit in the SMP layer (Figure 2d-e). On top of the SMP layer, we print a deformable layer with a fluidic microchannel (Figure 2f-g) allowing a fast cooling rate of 2.0 °C/s (cooling from 70 °C to 25 °C within 22 seconds). The high load capacity (Figure 2h) and shape adaptivity (Figure 2i) of the FRST actuator are finally demonstrated by a robotic gripper with three FRST actuators that can grasp and lift objects with arbitrary shapes and various weights spanning from less than 10 g to up to 1.5 kg.
Figure 2. FRST soft actuator made by hybrid multimaterial 3D printing technologies. (a) Schematics of the FRST soft actuator enabled by integrating a Joule-heating circuit and a fluidic cooling microchannel onto a stiffness-tunable SMP layer. (b) Demonstration of the stiff-soft duality of the FRST soft actuator between 25 °C and 70 °C. (c) Illustration of fabricating the four separate parts of an FRST soft actuator on a Polyjet multimaterial 3D printer. (d) Printing the deformable Joule-heating circuit on SMP I via DIW. (e) Demonstration of the flexibility of the printed Joule-heating circuit. (f) Assembling the four separate parts to form FRST actuator. (g) An assembled FRST soft actuator with a highlighted fluidic microchannel. (h) Grasping and lifting of a dumbbell weighing 1.5 kg. (i) Grasping of objects with arbitrary shapes and various weights ranging from less than 10 g to 1.5 kg.
3. Hydrogels
3.1 Highly Stretchable and UV Curable Hydrogels for DLP-based 3D Printing
Hydrogels, water-containing polymer networks, have found numerous applications in biomedicals, flexible electronic, and others. However, the traditional fabrication methods, which mainly rely on molding and casting, confine the scope of applications. 3D printing that creates complex 3D objects in free forms has been broadly used to fabricate 3D hydrogel structures. Compared with other 3D printing technologies, DLP-based 3D printing is an ideal one to fabricate highly complex 3D structures with high resolution (Figure 3a). However, due to the absence of highly efficient water-soluble photoinitiators, the UV curable hydrogels are limited to poly(ethylene glycol) diacrylate (PEGDA) and poly(N-Isopropylacrylamide) (pNIPAM) which are relatively brittle and are not sufficient for many applications that require large deformation (Figure 3b).
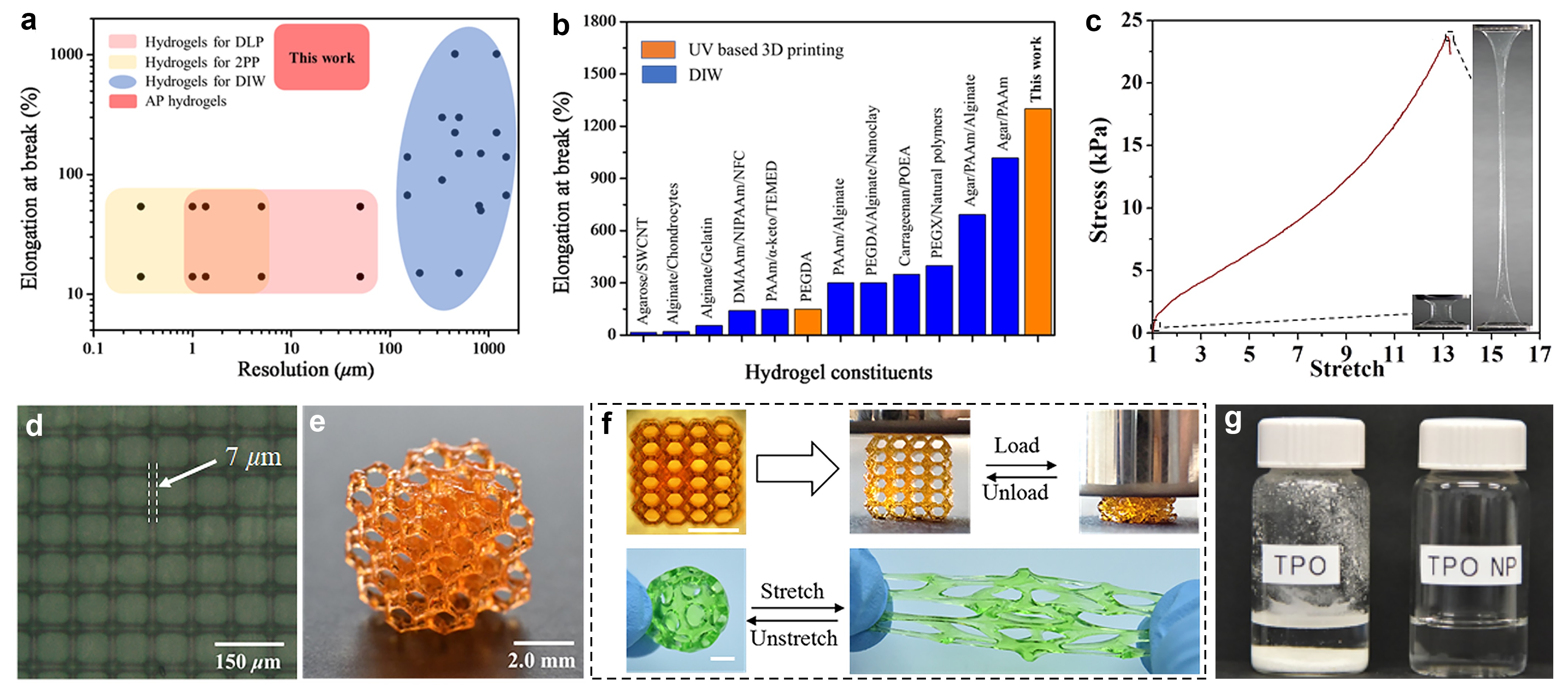
To address this challenge, we developed a simple but versatile method to prepare highly stretchable and UV curable hydrogels for DLP-based 3D printing (Figure 3a-c). The hydrogel precursors were prepared by mixing the Acrylamide-PEGDA (AP) mixture with self-developed highly water-soluble, high-efficiency photoinitator, 2,4,6-trimethylbenzoyl-diphenylphosphine oxide (TPO) nanoparticles. The AP hydrogel system exhibits high stretchability, and a printed hydrogel sample can be stretched by up to 1300%. (Figure 3c). AP hydrogels UV curable, thus compatible with DLP based 3D printing, which allows users to fabricate hydrogel 3D structures with high resolutions (up to 7 µm, Figure 3d), complex geometries (Figure 3e) and high deformability (Figure 3f). We converted the as-purchased none-water-soluble TPO powders into highly water-soluble TPO nanoparticles (Figure 3g) by encapsulating TPO powders within commercially available surfactants, sodium dodecyl sulfate (SDS).
Figure 3. Highly Stretchable and UV Curable Hydrogels for DLP-based 3D Printing. (a) Comparison of stretchability of the 3D printable hydrogels between the previously reported works and this work. (b) The stretchability-printing resolution relation. (c) The stress-stretch curve showing a hydrogel sample can be elongated by more than thirteen times of its original length. (d) 3D printed high resolution hydrogel grid. (e) 3D printed hydrogel Kelvin form. (f) Demonstrations of the highly deformable 3D printed hydrogel structures. (g) Comparison the water solubility between the as-purchased none-water-soluble TPO powders (left) and water-soluble TPO nanoparticles in water.
3.2 Multimaterial 3D Printing Hydrogels
In many applications, hydrogels are combined with other polymers to form hybrid structures which are used to protect, reinforce or add new functionalities to hydrogel structures. Despite of the recent rapid progresses, the polymers that hydrogels could be firmly bonded with are mainly restricted to silicone rubbers and the geometries of hydrogel-polymer hybrids are mostly constrained to laminate structures, which greatly limit the functionality and performance of hydrogel-polymer based devices and machines. To address this problem, we report a simple yet versatile multimaterial 3D printing approach that enables the fabrication of highly complex hybrid 3D structures consisting of highly stretchable and high-water-content hydrogels that are covalently bonded with diverse UV curable polymers including elastomer, rigid polymer, ABS-like polymer, shape memory polymer and other (meth)acrylate based UV curable polymers [38].
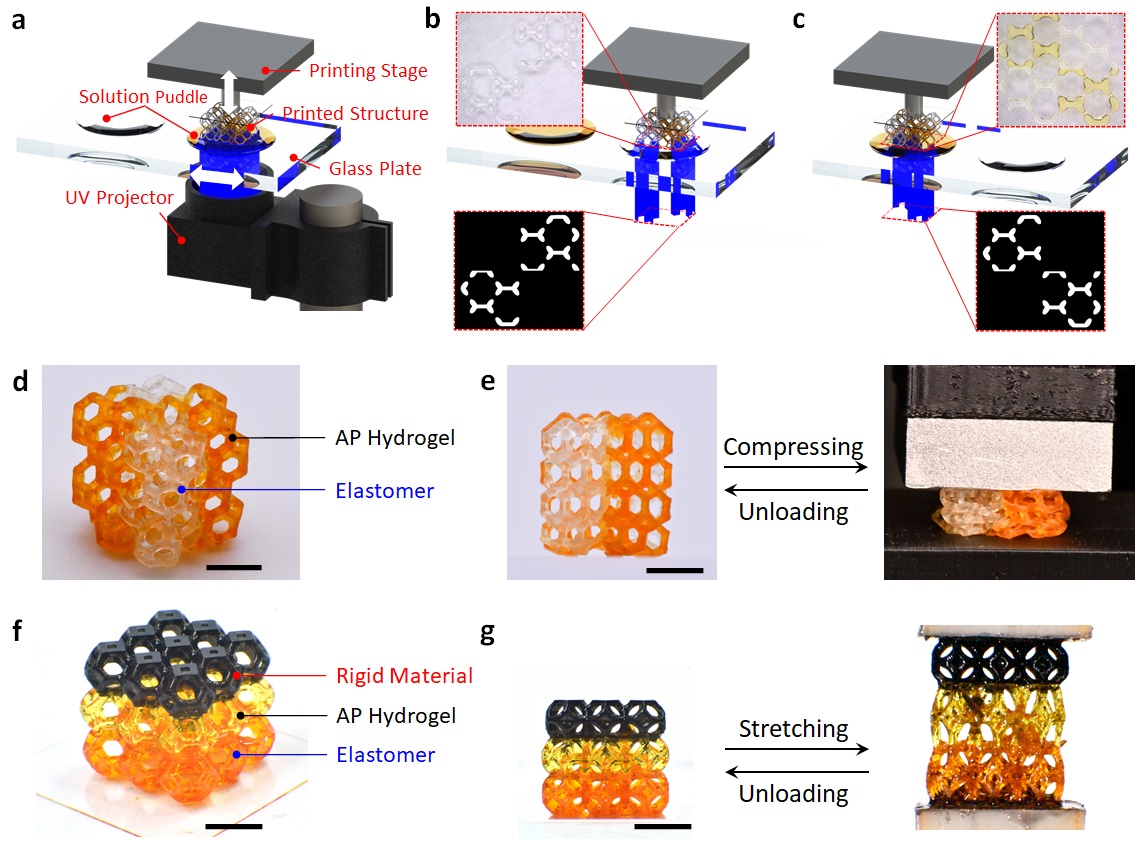
As shown in Figure 4a, we print the hydrogel-polymer heterogenous structures on a self-built high-resolution, high-efficiency DLP based multimaterial 3D printer [39]. Figure 4b-d demonstrate the process of printing a diagonally symmetric Kelvin form where half part is made of an elastomer (transparent) and the other half is made of AP hydrogel (yellow). As the strong covalent bonds are formed at the interfaces between the highly deformable AP hydrogel and elastomer, we can compress the printed multimaterial Kelvin form by 50% without finding any debonding between the two constituent materials (Figure 4e). To further demonstrate the versatility of this multimaterial 3D printing approach, we print a Kelvin foam where the three unit-cells are printed with rigid polymer, AP hydrogel and elastomer, respectively (Figure 4f). Again, the hydrogel forms strong covalent bonds with the other two polymers, and we can stretch the hybrid Kelvin foam structure by large deformation without finding debonding between the unit-cells printed with different materials (Figure 4g).
Figure 4. Multimaterial 3D Printing hydrogel with other polymers. (a) Illustration of the DLP based multimaterial 3D printing apparatus. (b and c) Processes of printing elastomer and hydrogel structures, respectively. (d) Snapshot of a diagonally symmetric Kelvin form made of AP hydrogel and elastomer. (e) Demonstration of the high deformability of the printed diagonally symmetric Kelvin form. (f) Snapshot of a printed Kelvin foam consisting of rigid polymer, AP hydrogel and elastomer. (g) Demonstration of the high stretchability of the printed multimaterial Kelvin Foam.
4. 3D Printing Elastomers for Soft Robots
4.1 Highly stretchable and UV Curable elastomers for DLP based 3D Printing
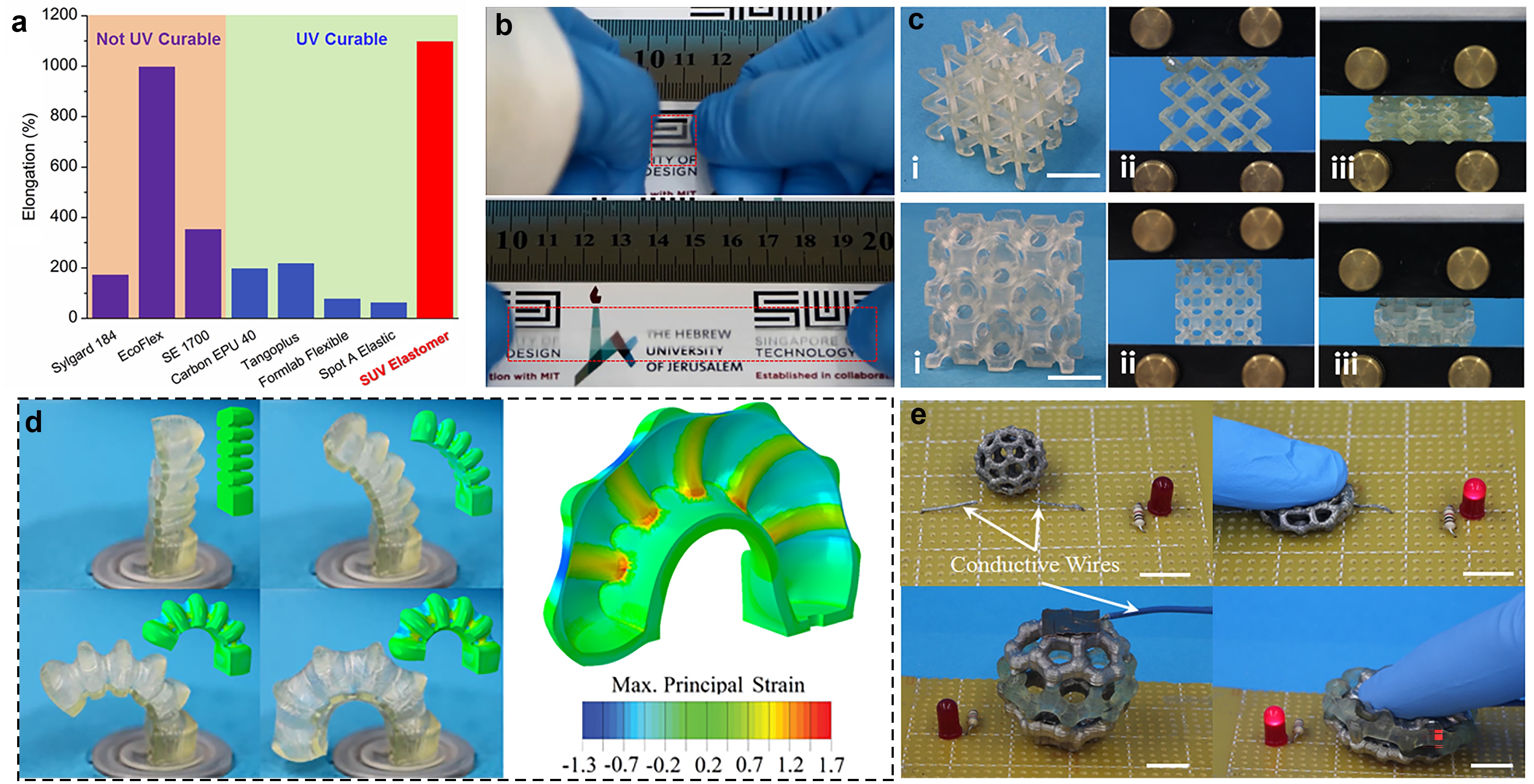
Elastomers, due to their excellent elasticity, are considered as ideal materials for fabricating soft robots and smart biomedical devices. The most widely used elastomers in these applications are silicon rubber, i.e. Ecoflex (Smooth-On), SE 1700 (Dow Corning), Sylgard (Dow Corning). However, the thermal curing process of these silicon rubbers constrains the fabrication of objects to only traditional ways, such as cutting, molding/casting, spin coating, etc. Therefore, UV curable elastomers are desired for directly 3D printing soft robots on DLP-based 3D printers. However, compared to the silicon rubbers, the stretchability of the commercially available UV curable elastomers is limited (Figure 5a). To address this issue, we developed a family of highly stretchable and UV curable (SUV) elastomers [40] that can be stretched by up to 1100% (Figure 5b), and are suitable for the DLP-based 3D printing for fabricating soft and deformable 3D structures and devices (Figure 5c), including soft robots and actuators (Figure 5d), flexible electronic devices (Figure 5e), and many other applications.
Figure 5. Highly stretchable and UV Curable elastomers. (a) Comparison of elongation at break between not UV curable silicone rubbers, commercially available UV curable elastomers and our SUV elastomer. (b) Snapshots of stretching a transparent SUV elastomer specimen by about 10 times. (c) 3D printed highly deformable lattice structures. (d) 3D printed pneumatically actuated soft actuator. (e) Bucky balls coated with silver nanoparticles working as an electric switch.
4.2 Miniature Pneumatic Soft Robots by High-resolution Multimaterial 3D Printing
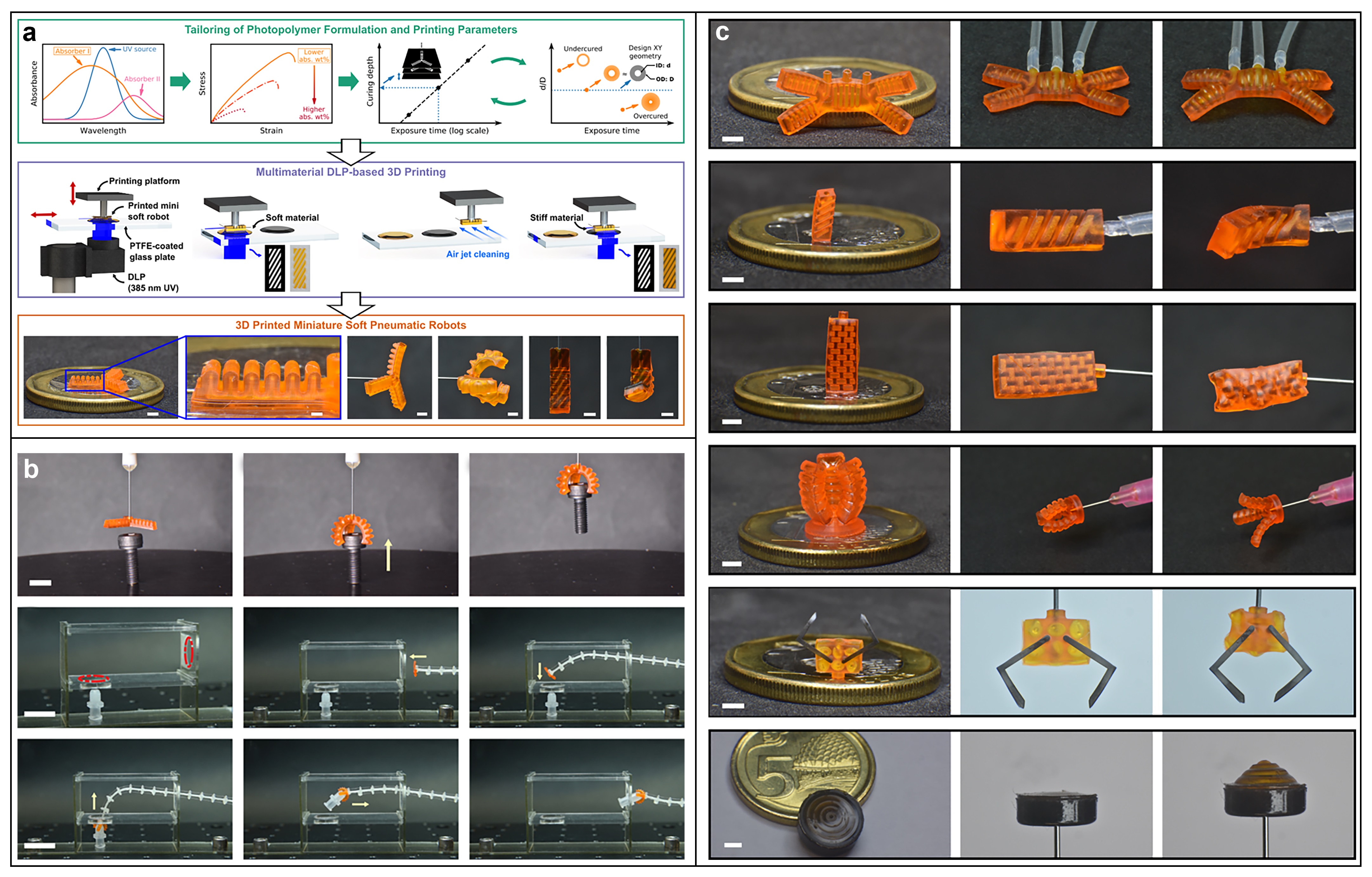
Miniature soft pneumatic robots offer excellent safety and deformability which are highly desirable in applications like navigating in confined areas or manipulating microscale objects. However, the design complexity of miniature soft pneumatic robots renders traditional manufacturing processes extremely cumbersome and arduous. While rapidly advancing 3D printing technologies offer manufacturing flexibility, it is still challenging to fabricate soft pneumatic robots at millimeter scale due to the difficulty in making microscale voids and channels which are essential for the pneumatic actuation. As shown in Figure 6a, we developed a generic process flow that provides a systematic and efficient paradigm to tailor the material formulation and key processing parameters for DLP-based 3D printing of miniature pneumatic soft robots [41]. As shown in Figure 6b, the printed miniature soft pneumatic actuators are exemplified by a soft debris remover that can navigate in a confined space and collect small objects in a hard-to-reach position. Moreover, as shown in Figure 6c, we can further print an assortment of miniature soft pneumatic robots with various geometric structures and morphing modes.
Figure 6. Multimaterial 3D printing miniature pneumatic soft robots. (a) A generic process flow to printing miniature multimaterial soft pneumatic robots. (b) Demonstration of debris removal in a confined space by combining a miniature soft pneumatic gripper and a continuum manipulator. (c) An assortment of printed miniature soft robot prototypes which are inspired by the literature.
5. Liquid Crystal Elastomers
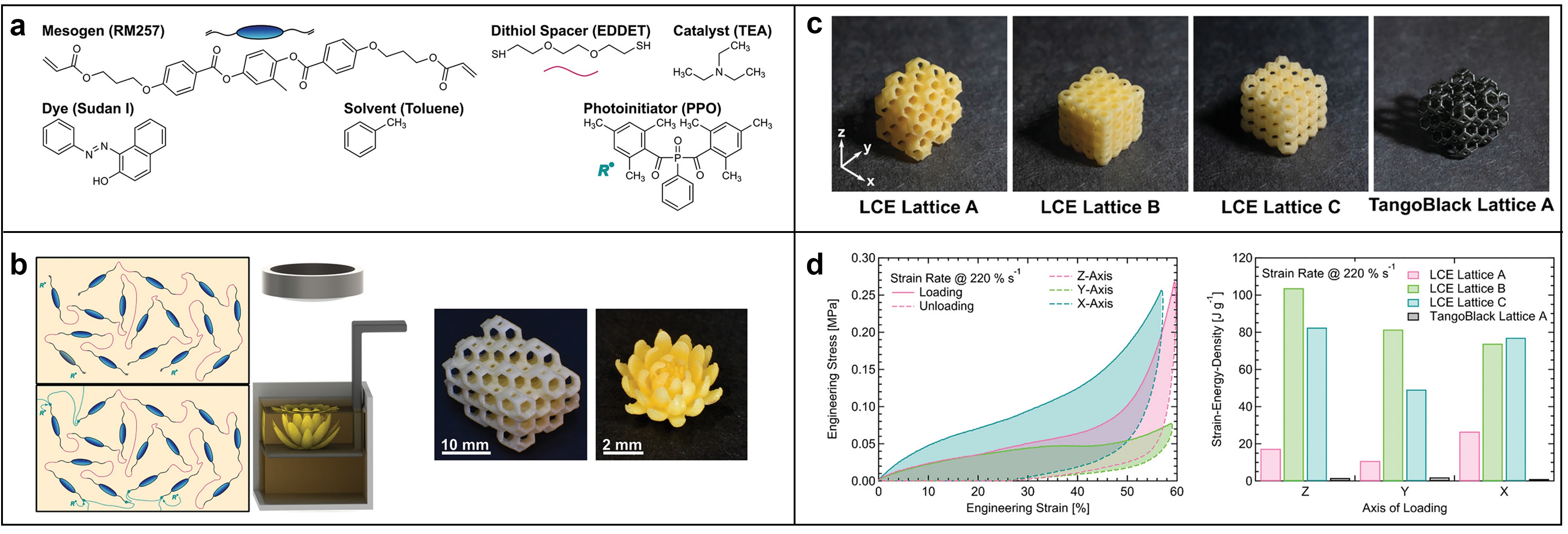
Besides printing soft robots, another key application area for 3D printing soft materials is the development of bespoke lattice structures from soft materials for dissipation of mechanical energy. This includes sports and personal protective equipment as well as biomedical devices. We collaborated with Professor Yakacki from University of Colorado at Denver to explore the approach to 3D print energy absorbing lattices made of liquid crystal elastomers (LCEs) with inherent dissipative behavior [42]. Bulk LCE structures with high resolution details and complex shapes were created using a bespoke thiol-acrylate LCE resin (Figure 7a) and a custom DLP 3D printer (Figure 7b) which enables the fabrication of different lattice structures with orthotropic (Lattice A), isotropic (Lattice B) and transverse isotropic (Lattice C) symmetries with LCE resin (Figure 7c). The strain energy density, a measure of hysteresis and energy loss, for each lattice loading direction and material is shown in Figure 7d. In all of the faster rate tests, the LCE lattice had a range of 5 to 27 times greater strain energy density than the commercial elastomer TangoBlack. This study is a step towards realizing applications for LCEs as dissipative devices. Rate-dependent foams are sought for improving devices such as helmet materials or vehicle bumpers reinforcement.
Figure 7. 3D printing liquid crystal elastomers for energy dissipative structures. (a) Chemicals for preparing the UV curable LCE resin. (b) DLP-based 3D printing to fabricate LCE structures. (c) 3D printed lattice structures with different patterns. (d) Strain energy density was observed to compare the damping abilities of different lattices made from LCEs.
6. Reprocessable Thermosets for Sustainable 3D Printing
Among all three-dimensional (3D) printing materials, thermosetting photopolymers claim almost half of the market, and have been widely used in various fields owing to their superior mechanical stability at high temperatures, excellent chemical resistance as well as good compatibility with high-resolution 3D printing technologies. However, once these thermosetting photopolymers form 3D parts through photopolymerization, the covalent networks are permanent and cannot be reprocessed. This unprocessable nature, combined with the explosion in 3D printing globally is leading to vast waste of 3D printing materials with serious environmental implications. To address this issue, we report a two-step polymerization strategy to develop 3D printing reprocessable thermosets (3DPRTs) that are reshapable, repairable and recyclable [43].
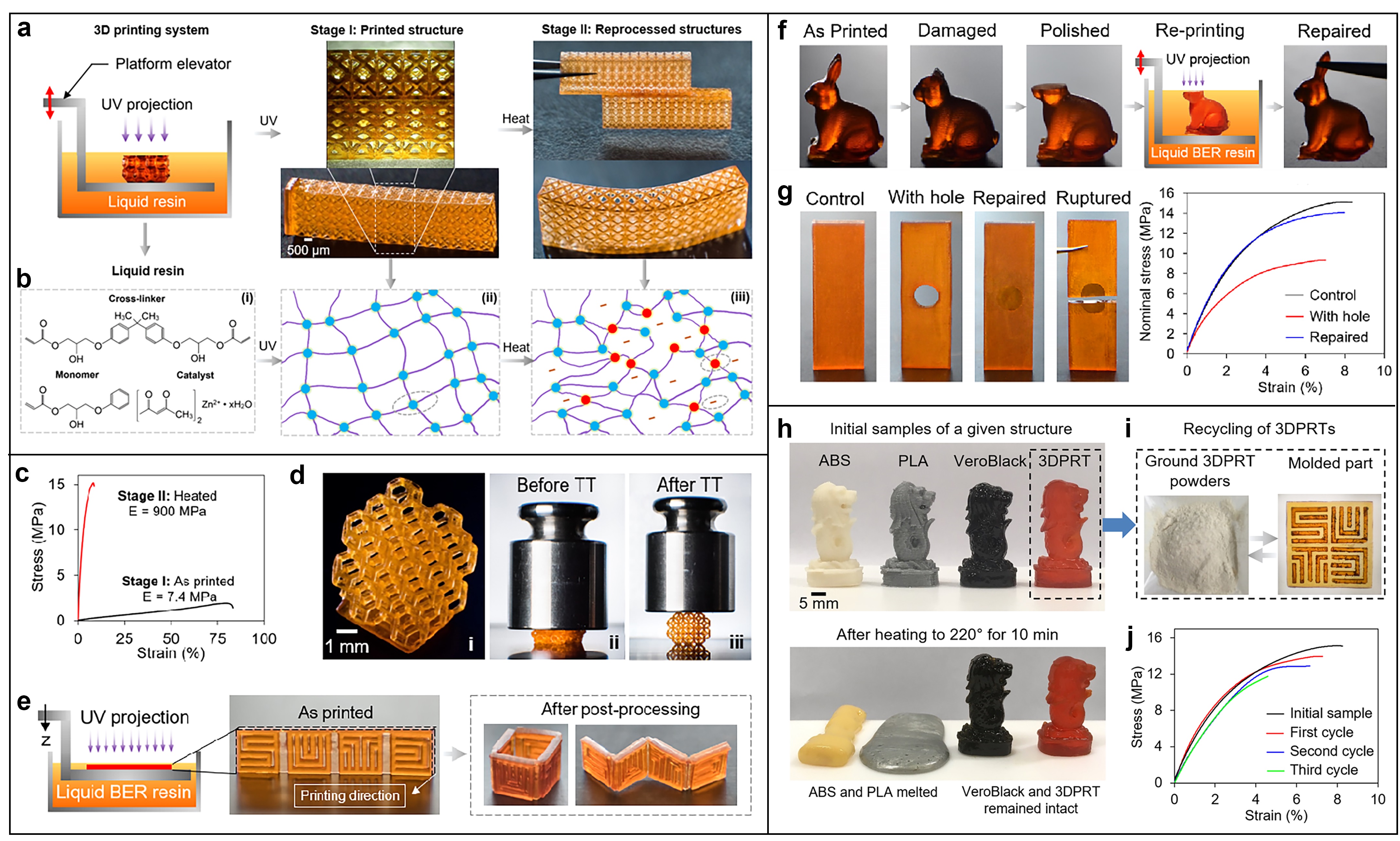
In the 3DPRT solution, UV reactive acrylate functional groups allow compatibility with DLP-based 3D printing (Stage I in Figure 8a) and the bond exchange reaction (BER) between the hydroxyl and ester functional groups upon heating imparts reprocessability (Stage II in Figure 8a). Figure 8b illustrates the two-step polymerization. The thermal treatment significantly increases the sample’s modulus from 7.4 MPa to 900 MPa (Figure 8c). Figure 8d demonstrates the enhancement in mechanical stiffness after thermal treatment. This significant stiffness increase facilitates the reshapability of the 3D printed structures. As demonstrated in Figure 8e, a printed thin strip can be thermoformed into 3D cubic and wavy shapes by mechanical folding and thermal curing. 3DPRT printing also make the printed structures repairable. Figure 8f shows the process to repair a damaged rabbit, and the thermal treatment enables the repaired sample recovers ~100% of the stiffness, and 93% of strength after the thermal treatment (Figure 8g). In addition, compared to thermoplastic 3D printing materials, 3DPRTs like traditional thermosets are dimensionally stable at high temperatures (Figure 8h). Moreover, different from traditional thermosets, the 3DPRTs exploit BERs to realize recyclability of 3D printed (Figure 8i) and the overall mechanical performance of the recycled sample is reasonably good (Figure 8j).
Figure 8. Reprocessable Thermosets for Sustainable 3D Printing. (a) General route of 3D printing lattice structures with 3DPRT. (b) Polymer chemistry involved in the two-step polymerization: (i) Chemical structures of monomer, crosslinker, initiator and catalyst in the photopolymer solution; (ii) UV curing forms the permanent covalent bonds; (iii) Thermal-triggered transesterification leads to the formation of DCBs. (c)-(d) Reshapability of 3DPRTs. (c) Comparison in the stress-strain behavior before and after thermal treatment. (d) Demonstration of the stiffening effect after thermal treatment. (e) Demonstration of the reshapability of a printed sheet. (f)-(g) Reparability of 3DPRTs. (f) Demonstration of the ability to repair flawed printed structures: surgery on a damaged rabbit. (g) Uniaxial tensile tests to examine the repair performance. (h)-(j) Recyclability of 3DPRTs. (h) Stability comparison of a printed structure with 3DPRT and structures printed with commercial available thermoplastics at 220 °C. (i) Demonstration of recycling of a structure printed with 3DPRT. (j) Uniaxial tensile tests to examine the mechanical repeatability of the recycled 3DPRTs.
7. Outlook
The further development on 3D printing of soft materials, especially SAMs, requires interdisciplinary research and technological advances in hardware multifunctional 3D printing techniques, 3D printable soft materials, as well as novel design and modeling tools: (i) high-resolution, multiscale, and multimaterial 3D printing technologies are highly desired to satisfy the rapid production of soft materials and devices with multiscale complex geometries; (ii) novel 3D printable soft materials, especially more 3D printable SAMs, are needed for further expanding 3D printing of soft material to practical applications; (iii) theoretical models and design methodology are needed to accurately optimize the fabrication process, multimaterial structure design, and actuation control.
Reference
1. Lendlein, A. and R. Langer, Biodegradable, Elastic Shape-Memory Polymers for Potential Biomedical Applications. 2002. 296(5573): p. 1673-1676.
2. Behl, M. and A. Lendlein, Shape-memory polymers. Materials Today, 2007. 10(4): p. 20-28.
3. Lee, K.Y. and D.J. Mooney, Hydrogels for Tissue Engineering. Chemical Reviews, 2001. 101(7): p. 1869-1880.
4. Sun, J.-Y., et al., Highly stretchable and tough hydrogels. Nature, 2012. 489(7414): p. 133-136.
5. Kim, C.C., et al., Highly stretchable, transparent ionic touch panel. Science, 2016. 353(6300): p. 682-687.
6. Keplinger, C., et al., Stretchable, Transparent, Ionic Conductors. Science, 2013. 341(6149): p. 984-987.
7. Li, T., et al., Fast-moving soft electronic fish. Science Advances, 2017. 3(4): p. e1602045.
8. Hanzon, D.W., et al., Adaptable liquid crystal elastomers with transesterification-based bond exchange reactions. Soft Matter, 2018. 14(6): p. 951-960.
9. He, Q., et al., Electrically controlled liquid crystal elastomer–based soft tubular actuator with multimodal actuation. Science Advances, 2019. 5: p. eaax5746.
10. Qian, X., et al., Artificial phototropism for omnidirectional tracking and harvesting of light. Nature Nanotechnology, 2019. 14: p. 1-8.
11. Zhao, Y., et al., Soft phototactic swimmer based on self-sustained hydrogel oscillator. Science Robotics, 2019. 4(33): p. eaax7112.
12. Ryu, J., et al., Photo-origami—Bending and folding polymers with light. Applied Physics Letters, 2012. 100(16): p. 161908.
13. Kim, Y., et al., Ferromagnetic soft continuum robots. Science Robotics, 2019. 4(33): p. eaax7329.
14. Kim, Y., et al., Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature, 2018. 558(7709): p. 274-279.
15. Ze, Q., et al., Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Advanced Materials, 2020. 32(4): p. 1906657.
16. Akbari, S., et al., Enhanced multimaterial 4D printing with active hinges. Smart Materials and Structures, 2018. 27(6): p. 065027.
17. Lin, C., et al., 4D-Printed Biodegradable and Remotely Controllable Shape Memory Occlusion Devices. Advanced Functional Materials, 2019. 29(51): p. 1906569.
18. Lin, W., et al., Cartilage-inspired, lipid-based boundary-lubricated hydrogels. Science, 2020. 370(6514): p. 335.
19. Yuk, H., et al., Dry double-sided tape for adhesion of wet tissues and devices. Nature, 2019. 575(7781): p. 169-174.
20. Tibbits, S. The emergence of “4D printing”. 2013; Available from: https://www.ted.com/talks/skylar_tibbits_the_emergence_of_4d_printing&n…;
21. Ge, Q., H.J. Qi, and M.L. Dunn, Active materials by four-dimension printing. 2013. 103(13): p. 131901.
22. Ge, Q., et al., Active origami by 4D printing. Smart Materials and Structures, 2014. 23(9): p. 094007.
23. Ge, Q., et al., Multimaterial 4D Printing with Tailorable Shape Memory Polymers. Scientific Reports, 2016. 6(1): p. 31110.
24. Mao, Y., et al., Sequential Self-Folding Structures by 3D Printed Digital Shape Memory Polymers. Scientific Reports, 2015. 5(1): p. 13616.
25. Wu, J., et al., Multi-shape active composites by 3D printing of digital shape memory polymers. Scientific Reports, 2016. 6(1): p. 24224.
26. Zarek, M., et al., 3D Printing of Shape Memory Polymers for Flexible Electronic Devices. 2016. 28(22): p. 4449-4454.
27. Yang, C., et al., 4D printing reconfigurable, deployable and mechanically tunable metamaterials. Materials Horizons, 2019. 6(6): p. 1244-1250.
28. Sydney Gladman, A., et al., Biomimetic 4D printing. Nature Materials, 2016. 15(4): p. 413-418.
29. Raviv, D., et al., Active Printed Materials for Complex Self-Evolving Deformations. Scientific Reports, 2014. 4(1): p. 7422.
30. Wu, D., et al., Visualizing Morphogenesis through Instability Formation in 4-D Printing. ACS Applied Materials & Interfaces, 2019. 11(50): p. 47468-47475.
31. Yuan, C., et al., 3D printed reversible shape changing soft actuators assisted by liquid crystal elastomers. Soft Matter, 2017. 13(33): p. 5558-5568.
32. Davidson, E.C., et al., 3D Printable and Reconfigurable Liquid Crystal Elastomers with Light-Induced Shape Memory via Dynamic Bond Exchange. 2020. 32(1): p. 1905682.
33. Zhang, C., et al., 4D Printing of a Liquid Crystal Elastomer with a Controllable Orientation Gradient. ACS Applied Materials & Interfaces, 2019. 11(47): p. 44774-44782.
34. Kotikian, A., et al., Untethered soft robotic matter with passive control of shape morphing and propulsion. 2019. 4(33): p. eaax7044.
35. Xu, T., et al., Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Science Robotics, 2019. 4(29): p. eaav4494.
36. Kuang, X., et al., Advances in 4D Printing: Materials and Applications. 2019. 29(2): p. 1805290.
37. Zhang, B., et al., Self-Healing Four-Dimensional Printing with an Ultraviolet Curable Double-Network Shape Memory Polymer System. ACS Applied Materials & Interfaces, 2019. 11(10): p. 10328-10336.
38. Ge, Q., et al., 3D printing of highly stretchable hydrogel with diverse UV curable polymers. Science Advances, 2021. 7: p. eaba4261.
39. Kowsari, K., et al., High-Efficiency High-Resolution Multimaterial Fabrication for Digital Light Processing-Based Three-Dimensional Printing. 3D Printing and Additive Manufacturing, 2018. 5(3): p. 185-193.
40. Patel, D.K., et al., Highly Stretchable and UV Curable Elastomers for Digital Light Processing Based 3D Printing. Advanced Materials, 2017. 29(15): p. 1606000.
41. Zhang, Y.-F., et al., Miniature Pneumatic Actuators for Soft Robots by High-Resolution Multimaterial 3D Printing. Advanced Materials Technologies, 2019. 4(10): p. 1900427.
42. Traugutt, N.A., et al., Liquid-Crystal-Elastomer-Based Dissipative Structures by Digital Light Processing 3D Printing. Advanced Materials, 2020. 32(28): p. 2000797.
43. Zhang, B., et al., Reprocessable thermosets for sustainable three-dimensional printing. Nature Communications, 2018. 9(1): p. 1831.
| Attachment | Size |
|---|---|
| Figure 1.jpg | 1.67 MB |
| Figure 2.jpg | 160.2 KB |
| Figure 3.jpg | 965.5 KB |
| Figure 4.jpg | 261.63 KB |
| Figure 5.jpg | 1.3 MB |
| Figure 6.jpg | 1.61 MB |
| Figure 7.jpg | 884.78 KB |
| Figure 8.jpg | 1.66 MB |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4D printing of shape memory polymers
Dear Qi,
Thanks for your summary. Fantastic work! Now, in 4D printing of shape memory polymers, we still need to apply external force to make the printed structure memorize the shape. I am curious whether it is possible to print a structure of two-way shape memory polymer which can deform immediately under external stimuli. Just like the work that have been done in hydrogels and liquid crystal elastomers.
Thanks.
Zhijian
In reply to 4D printing of shape memory polymers by Zhijian Wang
Dear Zhijian,
Dear Zhijian,
Thank you very much for raising this challenging but important question. As you mentioned, the shape memory polymers can be classified into two types: (1) one-way SMP which requires an external stimulation to reprogram the shape memory effect (SME) again after the SMP return the original shape from the temporary shape. One-way SMP is the main type that has been applied to 4D printing, but its disadvantage is obvious since it also requires the external load to reprogram the SME. (2) The two-way SMP (2W-SMP) which can switch the original and temporary shapes cyclically upon heating-cooling without reprograming.
In the last two decades, many efforts have been made to develop 2W-SMP [1, 2]. However, in the early years, the 2W-SMP requires a constant external force to realize the 2W-SME, and the 2W-SME cannot be completed after the removal of external force. This is called the quasi two-way SMP. The applied external force greatly limits the application of quasi two-way SMPs in various fields. Therefore, more researches focus on the study of 2W-SMP under stress-free conditions. The free-standing 2W-SMP is realized mainly through the idea of defining the orientation of the crystallization induce elongation (CIE) [3-6]. However, so far, I haven’t seen any work that reports 4D printing of 2W-SMP. I think that the key challenges include (i) how to make the 2W-SMP printable. For DLP based 3D printing, how to make the 2W-SMP precursor UV curable while maintaining relatively low viscosity (less than 10 Pa·S) is the key; for DIW based 3D printing, how the make the 2W-SMP precursor have the shear-thinning effect is the key. (ii) How to define the orientation of the CIE . Although the free-standing 2W-SMP does not need external load during actuation, it still requires the application of an external load to define the orientation of CIE. Then, the question is how and when to apply this external load when we print 2W-SMP?
To realize 4D printing of 2W-SMP isn’t easy but would be very impactful, we are looking forward to the breakthrough in the near future.
Kevin
Reference
1. Chung, T.; Romo-Uribe, A.; Mather, P. T., Two-Way Reversible Shape Memory in a Semicrystalline Network. Macromolecules 2008, 41 (1), 184-192.
2. Zhao, Q.; Qi, H. J.; Xie, T., Recent progress in shape memory polymer: New behavior, enabling materials, and mechanistic understanding. Progress in Polymer Science 2015, 49-50, 79-120.
3. Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A., Reversible Bidirectional Shape-Memory Polymers. Advanced Materials 2013, 25 (32), 4466-4469.
4. Yang, G.; Liu, X.; Tok, A. I. Y.; Lipik, V., Body temperature-responsive two-way and moisture-responsive one-way shape memory behaviors of poly(ethylene glycol)-based networks. Polymer Chemistry 2017, 8 (25), 3833-3840.
5. Zhou, J.; Turner, S. A.; Brosnan, S. M.; Li, Q.; Carrillo, J.-M. Y.; Nykypanchuk, D.; Gang, O.; Ashby, V. S.; Dobrynin, A. V.; Sheiko, S. S., Shapeshifting: Reversible Shape Memory in Semicrystalline Elastomers. Macromolecules 2014, 47 (5), 1768-1776.
6. Jin, B.; Song, H.; Jiang, R.; Song, J.; Zhao, Q.; Xie, T., Programming a crystalline shape memory polymer network with thermo- and photo-reversible bonds toward a single-component soft robot. Sci Adv 2018, 4 (1), eaao3865.
In reply to Dear Zhijian, by KevinGE
Dear Kevin,
Dear Kevin,
Thank you for such a helpful reply!
Best,
Zhijian
Fourth dimension
Dear Kevin,
Thank you for this valuable work.
Is the fourth dimension information introduced randomly in the 3D printer like you have cited for Lattice configutations in liquid cristal elastomers for the 4D printing ? We can get unexpected resulting structures in this case.
Mohammed
In reply to Fourth dimension by mohammedlamine
Dear Mohammed,
Dear Mohammed,
Thanks for your great question and sorry for my delayed reply!
First of all, I want to clarify that the example I present here about 3D printing with liquid crystal elastomer is not 4D printing. We demonstrate an example about harnessing the energy dissipation behavior of LCE during the phase transition between the monodomain state and the polydomain state [1] to print 3D lattice structures that could absorb energy upon impacts. Therefore, in our printed 3D structures, the LCE mesogens are randomly arranged as organized liquid-crystalline domains with varying alignments.
Besides 3D printing energy absorbing structures, LCEs have also been widely used to print soft actuators and robots. The pioneering works include 4D printing with LCEs presented by Prof. Taylor Ware’s group [2, 3] and untethered soft robots by 3D printing LCEs from Prof. Jennifer Lewis’ group [3]. The printed actuators and soft robots exhibit free-standing actuation due to the phase transition between the monodomain state and the isotropic state. Therefore, aligning the mesogens into monodomain is the key to realizing the free-standing actuation of the printed structures. So far, the 4D printed structures made of LCEs are mainly printed using DIW-based 3D printing which aligns the mesogens through the shear force during the extrusion-based printing process.
Hope my reply helps.
Kevin
Reference
[1] https://imechanica.org/node/16853
[2] Ambulo, C. P.; Burroughs, J. J.; Boothby, J. M.; Kim, H.; Shankar, M. R.; Ware, T. H., Four-dimensional Printing of Liquid Crystal Elastomers. ACS Applied Materials & Interfaces 2017, 9 (42), 37332-37339.
[3] Saed, M. O.; Ambulo, C. P.; Kim, H.; De, R.; Raval, V.; Searles, K.; Siddiqui, D. A.; Cue, J. M. O.; Stefan, M. C.; Shankar, M. R.; Ware, T. H., Molecularly-Engineered, 4D-Printed Liquid Crystal Elastomer Actuators. 2019, 29 (3), 1806412.
[4] Kotikian, A.; McMahan, C.; Davidson, E. C.; Muhammad, J. M.; Weeks, R. D.; Daraio, C.; Lewis, J. A., Untethered soft robotic matter with passive control of shape morphing and propulsion. 2019, 4 (33), eaax7044.