
In our recent work, we construct a hybrid light-powered tensegrity robot composed of both hard and soft materials. The tensegrity robot shows great scalability, deployability, impact-mitigation capability, high load capacity, and can be precisely controlled to move on multiterrains. It is an example of combining interesting structures and interesting actuating materials in soft robotics.
Abstract:
Traditional hard robots often require complex motion-control systems to accomplish various tasks, while applications of soft-bodied robots are limited by their low load-carrying capability. Herein, a hybrid tensegrity robot composed of both hard and soft materials is constructed, mimicking the musculoskeletal system of animals. Employing liquid crystal elastomer– carbon nanotube composites as artificial muscles in the tensegrity robot, it is demonstrated that the robot is extremely deformable, and its multidirectional locomotion can be entirely powered by light. The tensegrity robot is ultralight, highly scalable, has high load capacity, and can be precisely controlled to move along different paths on multiterrains. In addition, the robot also shows excellent resilience, deployability, and impact-mitigation capability, making it an ideal platform for robotics for a wide range of applications.
Zhijian Wang#, Kai Li#, Qiguang He, and Shengqiang Cai*, A light-powered ultralight tensegrity robot with high deformability and load capacity, Advanced Materials, https://doi.org/10.1002/adma.201806849.
| Attachment | Size |
|---|---|
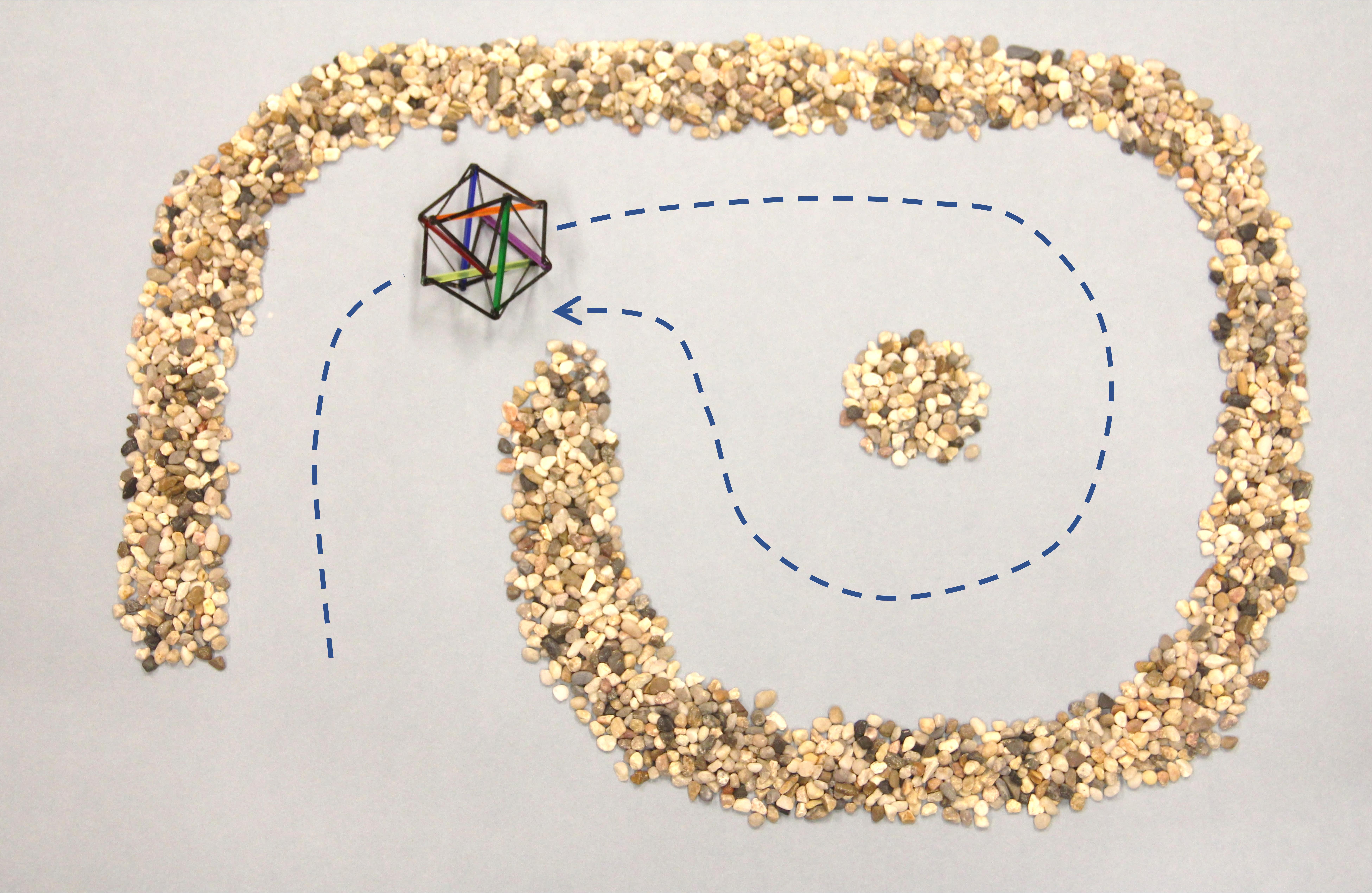
| The moving path of tensegrity robot in a maze | 2.29 MB |
{kind=link}